
**Download Files:**
Moment of Inertia & Angular Momentum Conservation.pptx
Moment of Inertia & Angular Momentum Conservation.pdf
# 1. Versuchstitel
Das Thema dieses Experiments ist **Messung des Trägheitsmoments und Erhaltung des Drehimpulses**.
# 2. Versuchsziel
Durch Messung der Winkelbeschleunigung eines rotierenden starren Körpers (Rigid Body) soll das **Trägheitsmoment (Moment of Inertia)** des Körpers experimentell bestimmt werden. Durch den Vergleich des experimentell erhaltenen Wertes mit dem theoretisch aus der geometrischen Struktur berechneten Wert sollen die dynamischen Prinzipien der Rotationsbewegung verstanden werden. Außerdem soll experimentell bestätigt werden, dass der **Drehimpuls (Angular Momentum)** erhalten bleibt, wenn kein äußeres Drehmoment auf das rotierende System wirkt, und die dabei auftretenden Energieänderungen sollen betrachtet werden.
# 3. Relevante Theorie
## 3.1 Trägheitsmoment (Moment of Inertia)
Die physikalische Größe, die in der Rotationsbewegung der Masse in der geradlinigen Bewegung entspricht und die Stärke der Neigung eines Körpers beschreibt, seinen Rotationszustand beizubehalten. Für Partikel der Masse $m_i$, die einen Abstand $r_i$ zur Rotationsachse haben, ist das Trägheitsmoment $I$ definiert als
$$I = \sum m_i r_i^2$$
Für einen starren Körper mit kontinuierlicher Massenverteilung wird es durch Integration über ein infinitesimales Massenelement $dm$ bestimmt:
$$I = \int r^2 dm$$
### 3.1.1 Herleitung der Trägheitsmomente für Scheibe (Disk) und Ring (Ring)
#### 3.1.1.1 Gleichmäßige Scheibe (Solid Disk)
Betrachte eine gleichmäßig verteilte Scheibe mit dem Radius $R$ und der Gesamtmasse $M$ und bestimme ihr Trägheitsmoment bezüglich der Zentralachse. Die Flächendichte der Scheibe ist $\sigma = \frac{M}{\pi R^2}$.
Für einen infinitesimalen Ring mit Radius $r$ und Dicke $dr$ ist die Flächendifferenz $dA = 2\pi r dr$ und damit die infinitesimale Masse $dm = \sigma dA = \frac{M}{\pi R^2} \cdot 2\pi r dr$.
$$I_{disk} = \int_0^R r^2 dm = \int_0^R r^2 \left( \frac{2Mr}{R^2} \right) dr = \frac{2M}{R^2} \int_0^R r^3 dr$$
$$I_{disk} = \frac{2M}{R^2} \left[ \frac{r^4}{4} \right]_0^R = \frac{2M}{R^2} \cdot \frac{R^4}{4} = \frac{1}{2}MR^2$$
#### 3.1.1.2 Dicker Ring (Thick Ring)
Für einen Ring mit Innenradius $R_1$, Außenradius $R_2$ und Masse $M$ gilt die Flächendichte $\sigma = \frac{M}{\pi(R_2^2 - R_1^2)}$.
$$I_{ring} = \int_{R_1}^{R_2} r^2 \left( \frac{2Mr}{R_2^2 - R_1^2} \right) dr = \frac{2M}{R_2^2 - R_1^2} \left[ \frac{r^4}{4} \right]_{R_1}^{R_2}$$
$$I_{ring} = \frac{2M}{R_2^2 - R_1^2} \cdot \frac{R_2^4 - R_1^4}{4} = \frac{M}{2(R_2^2 - R_1^2)}(R_2^2 - R_1^2)(R_2^2 + R_1^2)$$
$$I_{ring} = \frac{1}{2}M(R_1^2 + R_2^2)$$
## 3.2 Herleitung der Beziehung zwischen Drehimpuls und Drehmoment (rotierende Form von Newtons 2. Gesetz)
Um Rotationsbewegungen dynamisch zu analysieren, wandelt man Newtons zweites Gesetz ($F = ma$) in die entsprechende Rotationsform um.
Für ein einzelnes Teilchen der Masse $m$ gilt die differentialle Form von Newtons zweitem Gesetz als zeitliche Änderungsrate des Impulses ($p = mv$):
$$F = \frac{dp}{dt} = m\frac{dv}{dt}$$
Ist der Ort des Teilchens durch den Ortsvektor $r$ vom Ursprung gegeben, so ist das auf das Teilchen wirkende Drehmoment $\tau$ als Kreuzprodukt des Ortsvektors mit der Kraft definiert:
$$\tau = r \times F$$
Setzt man die differentialle Form von Newtons Gesetz für $F$ ein, erhält man:
$$\tau = r \times \frac{dp}{dt} \tag{1}$$
Der Drehimpuls $L$ des Teilchens ist definiert als Kreuzprodukt von Ortsvektor und linearer Impuls:
$$L = r \times p$$
Die zeitliche Ableitung dieses Drehimpulses ergibt sich mit der Produktregel zu:
$$\frac{dL}{dt} = \frac{d}{dt}(r \times p) = \left( \frac{dr}{dt} \times p \right) + \left( r \times \frac{dp}{dt} \right)$$
Da $\frac{dr}{dt}$ die Geschwindigkeit $v$ ist und $p = mv$ gilt, ist das Kreuzprodukt von $v$ mit $mv$ Null ($v \times mv = 0$), sodass der erste Term verschwindet und nur der zweite Term übrig bleibt:
$$\frac{dL}{dt} = r \times \frac{dp}{dt} \tag{2}$$
Durch den Vergleich von (1) und (2) erhält man die fundamentale Beziehung zwischen Drehmoment und Drehimpuls: das resultierende Drehmoment entspricht der zeitlichen Änderungsrate des Drehimpulses.
$$\tau = \frac{dL}{dt} \tag{3}$$
Erweitert man diese Beziehung auf einen starren Körper, der um eine feste Achse rotiert, und benutzt die Beziehung $v = r\omega$ für die Teilchengeschwindigkeit bei Winkelgeschwindigkeit $\omega$, so folgt für den einzelnen Beitrag zum Drehimpuls $L = mr^2\omega$. Da $mr^2$ den Beitrag zum Trägheitsmoment $I$ darstellt, gilt $L = I\omega$. Differenziert man dies zeitlich und setzt in (3) ein, erhält man:
$$\tau = \frac{d}{dt}(I\omega) = I\frac{d\omega}{dt} = I\alpha \tag{4}$$
Damit erhält man die Rotationsform des Bewegungsprinzips, die dem translationalen $F = m\frac{dv}{dt}$ entspricht:
$$\tau = r \times F = I\alpha = \frac{dL}{dt}$$
Diese Gleichung ist die zentrale mathematische Grundlage in diesem Experiment, um das Trägheitsmoment $I$ aus der gemessenen Winkelbeschleunigung $\alpha$ von Scheiben und Ringen zu bestimmen.
## 3.3 Rotationskinetische Energie (Rotational Kinetic Energy) und Herleitung
Analog zur kinetischen Energie in der Translation, die von Masse und Geschwindigkeit abhängt, wird die kinetische Energie eines starren Körpers, der um eine feste Achse rotiert, durch das Trägheitsmoment und die Winkelgeschwindigkeit bestimmt. Diese Rotationskinetik lässt sich durch Anwendung der translativen kinetischen Energie auf jedes infinitesimale Masseelement des rotierenden Körpers herleiten.
### 3.3.1 Herleitungsprozess
Betrachte einen starren Körper, der mit Winkelgeschwindigkeit $\omega$ um eine feste Achse rotiert. Der Körper lässt sich als Ansammlung vieler kleiner Teilchen betrachten.
Für das $i$-te Teilchen der Masse $m_i$ im Abstand $r_i$ von der Rotationsachse gilt die Tangentialgeschwindigkeit
$$v_i = r_i \omega$$
Die translatale kinetische Energie dieses Teilchens ist
$$K_i = \frac{1}{2}m_i v_i^2$$
Setzt man $v_i = r_i \omega$ ein, erhält man
$$K_i = \frac{1}{2}m_i (r_i \omega)^2 = \frac{1}{2} m_i r_i^2 \omega^2$$
Die gesamte Rotationskinetik des Körpers ist die Summe über alle Teilchen. Da alle Teilchen dieselbe Winkelgeschwindigkeit $\omega$ teilen, kann $\omega^2$ aus der Summe herausgezogen werden:
$$K_{rot} = \sum_{i} K_i = \sum_{i} \left( \frac{1}{2} m_i r_i^2 \omega^2 \right)$$
$$K_{rot} = \frac{1}{2} \left( \sum_{i} m_i r_i^2 \right) \omega^2$$
Der Ausdruck in Klammern ist das Trägheitsmoment $I$ aus Abschnitt 3.1, daher:
$$K_{rot} = \frac{1}{2}I\omega^2$$
Dies ist das direkte Gegenstück zur translativen kinetischen Energie $K = \frac{1}{2}mv^2$, wobei in der Rotation die Rolle der Masse $m$ vom Trägheitsmoment $I$ übernommen wird und die lineare Geschwindigkeit $v$ durch die Winkelgeschwindigkeit $\omega$ ersetzt wird.
### 3.3.2 Physikalische Bedeutung im vorliegenden Experiment
Im Experiment B (Erhaltung des Drehimpulses) ist das Herunterfallen eines Masserings auf eine rotierende Scheibe mechanisch äquivalent zu einem vollkommen inelastischen Stoß: der Drehimpuls $L$ bleibt erhalten, da kein äußeres Drehmoment wirkt, aber aufgrund interner Reibung gehen kinetische Energieanteile in Wärme über, sodass sich die beiden Körper schließlich mit derselben Winkelgeschwindigkeit drehen. Mittels obiger Formeln lässt sich die Rotationsenergie vor und nach dem Stoß berechnen und zeigen, dass $\Delta K_{rot} < 0$ gelten kann.
## 3.4 Erhaltungssatz des Drehimpulses (Conservation of Angular Momentum)
Ist das resultierende äußere Drehmoment Null ($\tau_{ext} = 0$), so bleibt der Gesamtdrehimpuls des Systems konstant:
$$\frac{dL}{dt} = 0 \implies L = I_i \omega_i = I_f \omega_f = \text{Constant}$$
In diesem Experiment wird dies überprüft, indem ein Massering auf die rotierende Scheibe fallen gelassen wird und dadurch das Trägheitsmoment $I_i \to I_f$ verändert wird und die Winkelgeschwindigkeit von $\omega_i \to \omega_f$ wechselt.
## 3.5 Experimentelle Messmethode für das Trägheitsmoment und Herleitung der Formel
In diesem Experiment wird ein Faden um eine Achse (Radius $r$) gewickelt und an dessen Ende eine Masse $m$ aufgehängt, die frei fallen gelassen wird. Beim Fallen beschleunigt die Masse unter Gravitation und zieht am Faden, wodurch eine Spannung $T$ entsteht, die ein Drehmoment am Achsenradius $r$ erzeugt und das Gesamtsystem in Rotation versetzt. Die mechanischen Gleichungen lauten:
### 3.5.1 Translationsgleichung für die hängende Masse
Die auf die fallende Masse $m$ wirkenden Kräfte sind die Schwerkraft $mg$ nach unten und die Fadenspannung $T$ nach oben. Mit positiver Richtung nach unten ergibt Newtons zweites Gesetz für die lineare Beschleunigung $a$:
$$mg - T = ma \tag{1}$$
### 3.5.2 Rotationsgleichung des starren Körpers
Die Fadenspannung $T$ wirkt tangential am Achsenradius $r$ und erzeugt ein Drehmoment $\tau$. Für das Gesamtsystem mit Trägheitsmoment $I$ und Winkelbeschleunigung $\alpha$ gilt:
$$\tau = r \times T = rT = I\alpha \tag{2}$$
(Die Wirkungslinie der Spannung steht senkrecht zum Radius, daher $\sin 90^\circ = 1$.)
### 3.5.3 Kinematische Verbindung zwischen linearer und Winkelbeschleunigung
Unter der Annahme, dass der Faden nicht rutscht oder sich dehnt, gilt die Verbindung
$$a = r\alpha \tag{3}$$
### 3.5.4 Algebraische Herleitung der Messformel
Setzt man (3) in (1) ein und löst nach $T$ auf, erhält man:
$$mg - T = m(r\alpha)$$
$$T = m(g - r\alpha) \tag{4}$$
Einsetzen in (2) liefert:
$$r \cdot \left[ m(g - r\alpha) \right] = I\alpha$$
Ausmultipliziert ergibt sich:
$$mgr - mr^2\alpha = I\alpha$$
Teilt man beide Seiten durch $\alpha$ und löst nach $I$ auf, folgt:
$$I = \frac{mgr - mr^2\alpha}{\alpha} = \frac{mgr}{\alpha} - mr^2$$
Faktorisierung ergibt die experimentelle Formel:
$$I = mr^2 \left( \frac{g}{r\alpha} - 1 \right)$$
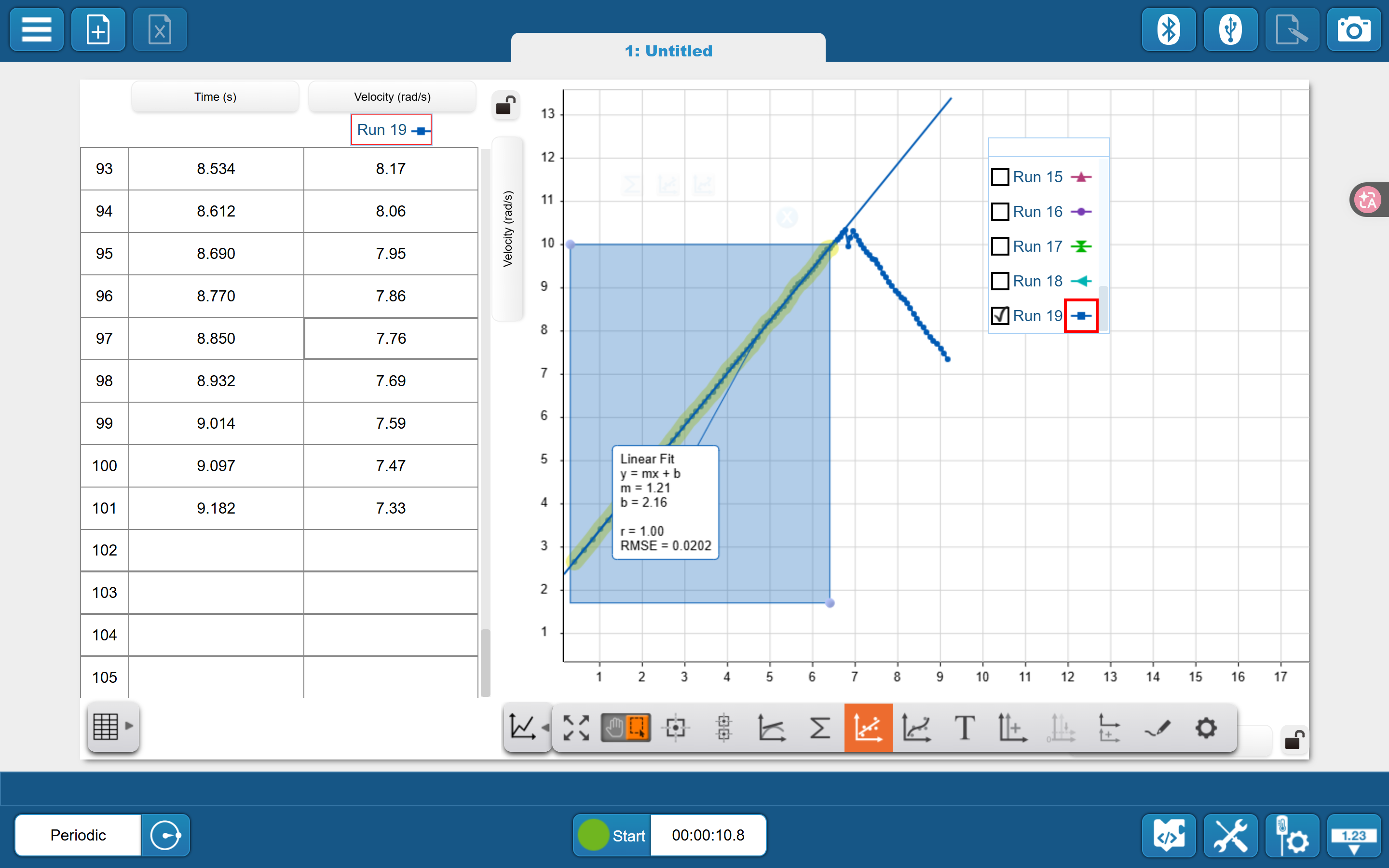
Mit dieser Formel lässt sich das Trägheitsmoment $I$ experimentell bestimmen, indem die geometrischen Konstanten (hängende Masse $m$, Achsenradius $r$), die Erdbeschleunigung $g$ und die aus SPARKvue durch lineare Regression ermittelte Winkelbeschleunigung $\alpha$ eingesetzt werden.
# 4. Versuchsaufbau und -durchführung
Der Versuch gliedert sich in zwei Hauptteile: In **Experiment A** wird mittels fallender Masse das Trägheitsmoment der Scheibe und des Rings gemessen; in **Experiment B** wird ein Ring auf eine rotierende Scheibe fallen gelassen, um die Erhaltung des Drehimpulses zu prüfen.
## 4.1 Experiment A: Messung des Trägheitsmoments (Measurement of Moment of Inertia)
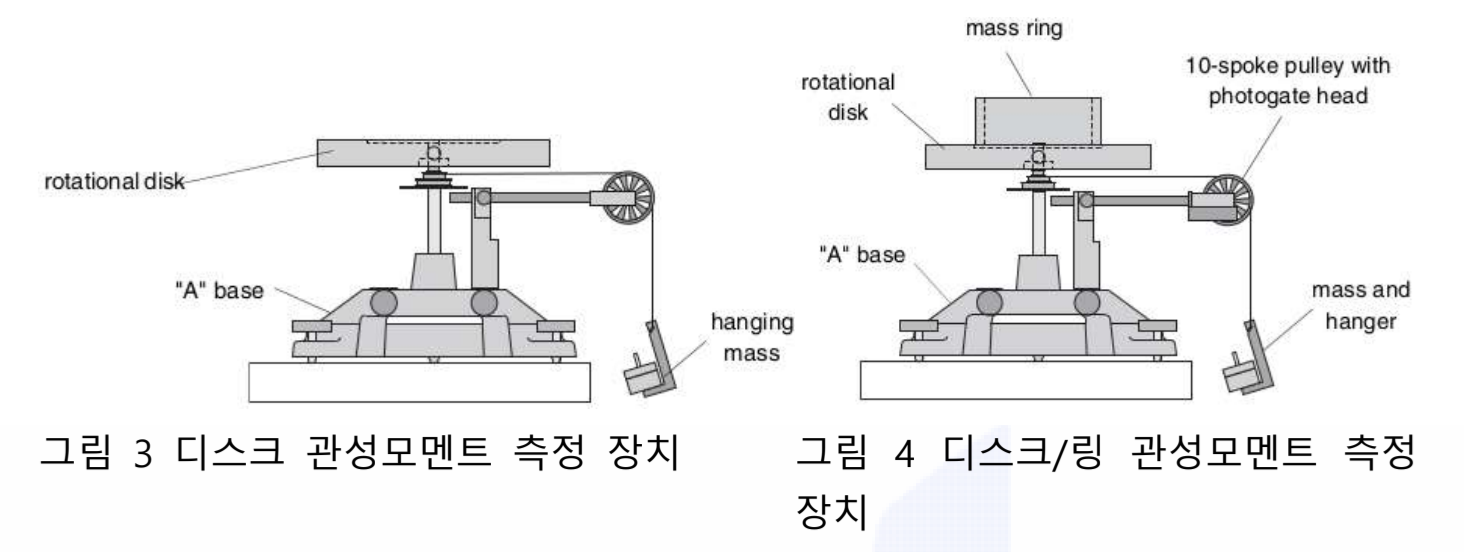
1. **Aufbau der Rotationsvorrichtung**: Montiere den Rotationsständer wie in [Abbildung 3] gezeigt und befestige die Scheibe (Rotational Disk) an der Achse. Verwende eine Wasserwaage (Leveler), um Ständer und Scheibe exakt horizontal auszurichten.
2. **Einstellung des Smart Gate**: Befestige das Smart Gate am Rotationsständer und justiere seine Position so, dass der Sensor genau die Nut (Spoke) der am Achsstumpf befestigten Rolle (Pulley) erfasst.
3. **Messung der Grundgrößen**: Messe die Gesamtmasse des hängenden Gewichts und des Hängers $m$ mit einer elektronischen Waage und bestimme den Achsenradius $r$, um den der Faden gewickelt wird, mit einer Messschieblehre (Vernier Calipers) präzise.
4. **Softwarevorbereitung**: Starte die SPARKvue-App und wähle **[Smart Gate Only]** -> [Smart Pulley (Rotational)]. Setze den **Spoke Angle** auf $36^\circ$ (oder den zum Gerät passenden Wert) und wähle **Velocity** und **Acceleration** als zu messende Größen.
5. **Messung der Winkelbeschleunigung der Scheibe**: Wickel den Faden um die Achse, lasse die hängende Masse fallen und messe die Winkelgeschwindigkeit während des Falls. Wähle im Datendiagramm ein Intervall, in dem die Winkelbeschleunigung $\alpha$ annähernd konstant ist, und führe eine lineare Regression durch, um die Steigung zu erhalten.
6. **Wiederholungsmessungen**: Wiederhole Schritt 5 insgesamt fünfmal, ermittle die durchschnittliche Winkelbeschleunigung der Scheibe und berechne daraus $I_{disk}$.
7. **Zugabe des Rings (Mass Ring)**: Lege den Ring auf die Scheibe und wiederhole die Schritte 5–6. Der gemessene Wert entspricht dem kombinierten Trägheitsmoment $I_{total$}, von dem das zuvor bestimmte $I_{disk}$ subtrahiert wird, um das experimentelle $I_{ring}$ zu erhalten.
## 4.2 Experiment B: Erhaltung des Drehimpulses (Conservation of Angular Momentum)
1. **Umkonfiguration der Vorrichtung**: Entferne den Faden und die hängende Masse aus Experiment A, sodass das System frei und ohne äußeres Drehmoment rotieren kann.
2. **Anfangsrotation und Start der Messung**: Bringe die Scheibe per Hand in Rotation und starte die Messung in SPARKvue.
3. **Messung der Anfangs-Winkelgeschwindigkeit ($\omega_1$)**: Notiere die Winkelgeschwindigkeit $\omega_1$ unmittelbar bevor der Ring fallengelassen wird.
4. **Abwurf des Rings**: Lasse den Ring vorsichtig auf die rotierende Scheibe fallen und achte darauf, dass er korrekt im Zentrum sitzt.
5. **Messung der späteren Winkelgeschwindigkeit ($\omega_2$)**: Nachdem der Ring auf der Scheibe sitzt und die Rotation stabilisiert ist, messe die stabile Winkelgeschwindigkeit $\omega_2$.
6. **Datenanalyse**: Berechne mit den gemessenen Werten $\omega_1, \omega_2$ und den in Experiment A bestimmten $I_{disk}, I_{total}$ die Drehimpulse $L_1, L_2$ vor und nach dem Stoß und überprüfe die Erhaltung.
7. **Wiederholung**: Wiederhole Schritte 2–6 fünfmal zur Verbesserung der Datenzuverlässigkeit.
# 5. Versuchsergebnisse
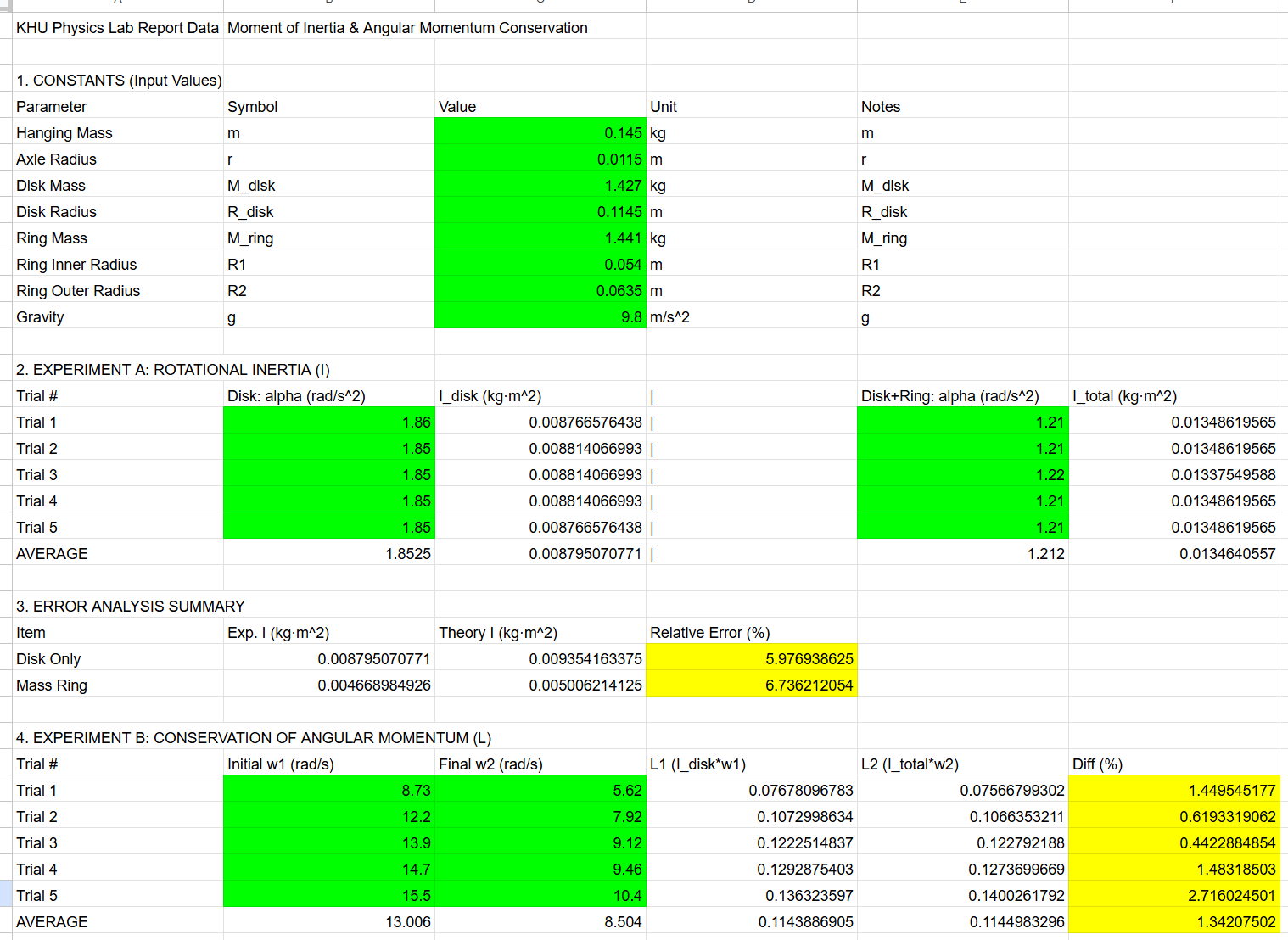
## 5.1 Versuchsgrößen und Konstanten (Constants)
Die in den Berechnungen von Experiment A und B verwendeten geometrischen Konstanten und gemessenen Massen lauten:
| Parameter | Symbol | Wert | Einheit |
|---|---|---|---|
| Hängende Masse | $m$ | 0.145 | $\text{kg}$ |
| Achsenradius | $r$ | 0.0115 | $\text{m}$ |
| Scheibenmasse | $M_{disk}$ | 1.427 | $\text{kg}$ |
| Scheibenradius | $R_{disk}$ | 0.1145 | $\text{m}$ |
| Ringmasse | $M_{ring}$ | 1.441 | $\text{kg}$ |
| Ring Innenradius | $R_1$ | 0.054 | $\text{m}$ |
| Ring Außenradius | $R_2$ | 0.0635 | $\text{m}$ |
| Erdbeschleunigung | $g$ | 9.8 | $\text{m/s}^2$ |
## 5.2 Experiment A: Messung des Trägheitsmoments (Rotational Inertia)
### 5.2.1 Messdaten und Berechnungen
Für die Scheibe allein und für Scheibe + Ring wurden jeweils fünf Versuche mit fallender Masse durchgeführt und die Winkelbeschleunigung $\alpha$ gemessen. Das experimentelle Trägheitsmoment wurde mit der Formel $I = mr^2 (\frac{g}{r\alpha} - 1)$ berechnet. Das Trägheitsmoment des Rings allein wurde aus der Differenz von Gesamtträgheitsmoment und Scheibenträgheitsmoment bestimmt ($I_{ring} = I_{total} - I_{disk}$).
| Versuch (Trial) | Scheibe $\alpha$ (rad/s^2) | Scheibe $I_{disk}$ (kg \cdot m^2) | Scheibe+Ring $\alpha$ (rad/s^2) | Gesamt $I_{total}$ (kg \cdot m^2) |
|---|---|---|---|---|
| Trial 1 | 1.860 | 0.008767 | 1.210 | 0.013486 |
| Trial 2 | 1.850 | 0.008814 | 1.210 | 0.013486 |
| Trial 3 | 1.850 | 0.008814 | 1.220 | 0.013375 |
| Trial 4 | 1.850 | 0.008814 | 1.210 | 0.013486 |
| Trial 5 | 1.850 | 0.008767 | 1.210 | 0.013486 |
| DURCHSCHNITT (AVERAGE) | 1.8525 | 0.008795 | 1.2120 | 0.013464 |
### 5.2.2 Fehleranalyse (Error Analysis Summary)
Die theoretischen Trägheitsmomente für Scheibe und Ring wurden jeweils mit den Formeln $I_{disk} = \frac{1}{2}MR^2$ und $I_{ring} = \frac{1}{2}M(R_1^2 + R_2^2)$ berechnet und mit den experimentellen Mittelwerten verglichen.
| Eintrag (Item) | Experimentell $I_{exp}$ (kg \cdot m^2) | Theoretisch $I_{theo}$ (kg \cdot m^2) | Relative Abweichung (\%) |
|---|---|---|---|
| Nur Scheibe (Disk Only) | 0.008795 | 0.009354 | 5.977 |
| Ring (Mass Ring) | 0.004669 | 0.005006 | 6.736 |
_※ Der experimentelle Wert für den Ring $I_{ring}$ wurde als (durchschnittliches Gesamtträgheitsmoment 0.013464) - (durchschnittliches Scheiben-Trägheitsmoment 0.008795) = 0.004669 berechnet._
## 5.3 Experiment B: Erhaltung des Drehimpulses (Conservation of Angular Momentum)
Das Experiment des vollkommen inelastischen Stoßes, bei dem ein Ring auf eine rotierende Scheibe fallen gelassen wird, wurde fünfmal wiederholt. Der Anfangsdrehimpuls vor dem Stoß $L_1 = I_{disk} \cdot \omega_1$ und der spätere Drehimpuls nach dem Stoß $L_2 = I_{total} \cdot \omega_2$ wurden berechnet und verglichen.
_(Hinweis: Die in den Drehimpulsberechnungen verwendeten Trägheitsmomente $I$ sind die experimentellen Mittelwerte aus Experiment A.)_
| Versuch (Trial) | Anfang $\omega_1$ (rad/s) | Später $\omega_2$ (rad/s) | Anfang $L_1$ (kg \cdot m^2/s) | Später $L_2$ (kg \cdot m^2/s) | Abweichung (\%) |
|---|---|---|---|---|---|
| Trial 1 | 8.730 | 5.620 | 0.076781 | 0.075668 | 1.450 |
| Trial 2 | 12.200 | 7.920 | 0.107300 | 0.106635 | 0.619 |
| Trial 3 | 13.900 | 9.120 | 0.122251 | 0.122792 | 0.442 |
| Trial 4 | 14.700 | 9.460 | 0.129288 | 0.127370 | 1.483 |
| Trial 5 | 15.500 | 10.400 | 0.136324 | 0.140026 | 2.716 |
| DURCHSCHNITT (AVERAGE) | 13.006 | 8.504 | 0.114389 | 0.114498 | 1.342 |
_※ Formel zur Berechnung der Abweichung: $\delta = \frac{\|L_1 - L_2\|}{L_1} \times 100 \%$_
# 6. Analyse und Diskussion
Für die Analyse wurden Python-basierte Datenanalyse- und Visualisierungsalgorithmen verwendet, um die gemessenen Werte und die theoretischen Werte aus Experiment A (Trägheitsmomentmessung) und Experiment B (Drehimpulserhaltung) quantitativ und visuell zu vergleichen. Absolute Vergleiche physikalischer Größen (Balkendiagramme) und die Entwicklung der relativen Fehler (Liniendiagramme) wurden in einem Dual-Axis-Kombinationsdiagramm implementiert, um die Datenzuverlässigkeit und systematische Fehler anschaulich zu analysieren.
Die relativen Fehler zwischen experimentellem Trägheitsmoment $I_{exp}$ und theoretischem Wert $I_{theo}$ sowie der Fehler des Drehimpulses vor und nach dem Stoß $\delta_L$ wurden wie folgt definiert und in der Analyse verwendet:
$$\delta_I(\%) = \frac{|I_{exp} - I_{theo}|}{I_{theo}} \times 100\%, \qquad \delta_L(\%) = \frac{|L_1 - L_2|}{L_1} \times 100\%$$
## 6.1 Experiment A: Präziser Vergleich des Trägheitsmoments der Scheibe (Disk Only)
Das erste Diagramm vergleicht die in fünf Versuchen gemessenen experimentellen Trägheitsmomente der reinen Scheibe mit dem aus den geometrischen Parametern berechneten theoretischen Wert.
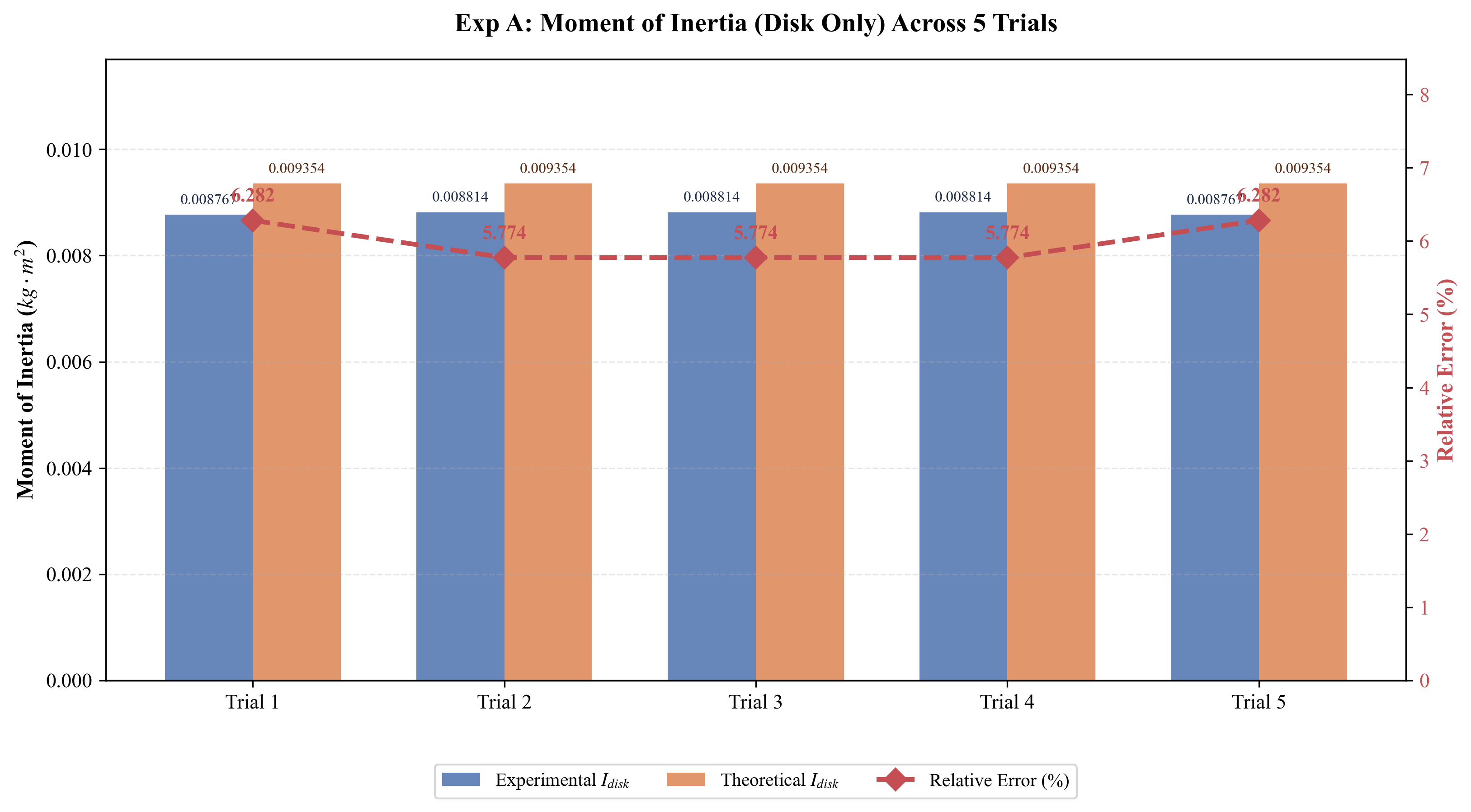
Die Analyse zeigt, dass die gemessenen experimentellen Werte (blaue Balken) in allen fünf Versuchen geringfügig unter den theoretischen Werten (orangefarbene Balken) liegen. Die durch die rote gestrichelte Linie dargestellte relative Abweichung liegt konsistent bei etwa **5.97%**.
Die sehr geringe Streuung der Daten deutet darauf hin, dass das Fallverfahren des Experimentators, die Messung der Winkelbeschleunigung $\alpha$ mit SPARKvue und die lineare Regression sehr präzise durchgeführt wurden. Die etwa 6% Abweichung ist daher eher als systematischer Fehler des Versuchsaufbaus denn als zufälliges Rauschen zu interpretieren.
## 6.2 Experiment A: Präziser Vergleich des Trägheitsmoments des Rings (Mass Ring)
Das zweite Diagramm vergleicht den experimentell bestimmten Trägheitsmomentwert des Rings (aus $I_{total} - I_{disk}$) mit dem theoretischen Wert.
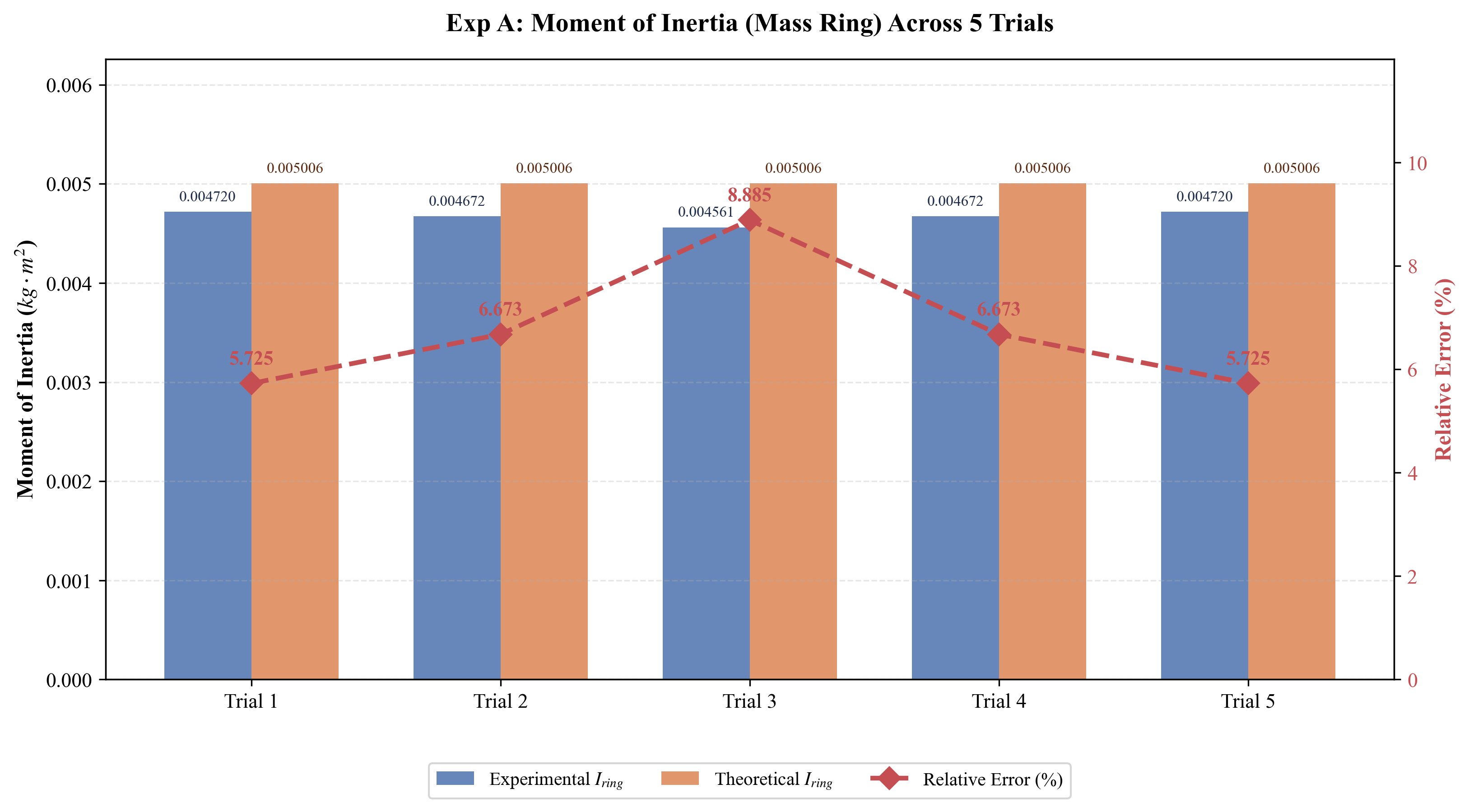
Die relative Abweichung des Rings beträgt ebenfalls etwa **6.73%**, was dem Trend aus dem Scheibenversuch entspricht und eine stabile Fehlergröße aufweist. Die um etwa 6% zu kleinen experimentellen Werte ($I_{exp} < I_{theo}$) lassen sich im Wesentlichen durch zwei Ursachen erklären:
1. **Erhöhung des effektiven Radius durch Fadendicke:**
In der Versuchsgleichung $I = mr^2 (\frac{g}{r\alpha} - 1)$ beeinflusst der Achsenradius $r$ das Ergebnis quadratisch. Der verwendete Wert $r = 0.0115\,\text{m}$ entspricht dem nackten Achsendurchmesser ohne aufgewickelten Faden. Tatsächlich ist der effektive Radius, an dem das Drehmoment wirkt, aufgrund der Fadendicke und Überlappungen leicht größer (etwa $r_{eff} = r + r_{string}/2$). Die Verwendung eines zu kleinen $r$ in der Formel führt zu zu kleinen experimentellen Trägheitsmomenten.
2. **Limitationen der Annahme einer idealen Massenverteilung:**
Formeln wie $0.5MR^2$ setzen eine perfekt gleichmäßige Massenverteilung voraus. Reale Scheiben und Ringe besitzen Befestigungsbohrungen, Nuten oder Materialunregelmäßigkeiten, die zu Abweichungen vom idealen Modell führen.
## 6.3 Experiment B: Zusammenfassende Analyse der Drehimpulserhaltung (Conservation of Angular Momentum)
Das dritte Diagramm zeigt die Änderung des Drehimpulses ($L_1$, $L_2$) vor und nach dem vollkommen inelastischen Stoß, wenn ein Ring auf eine rotierende Scheibe fallen gelassen wird.
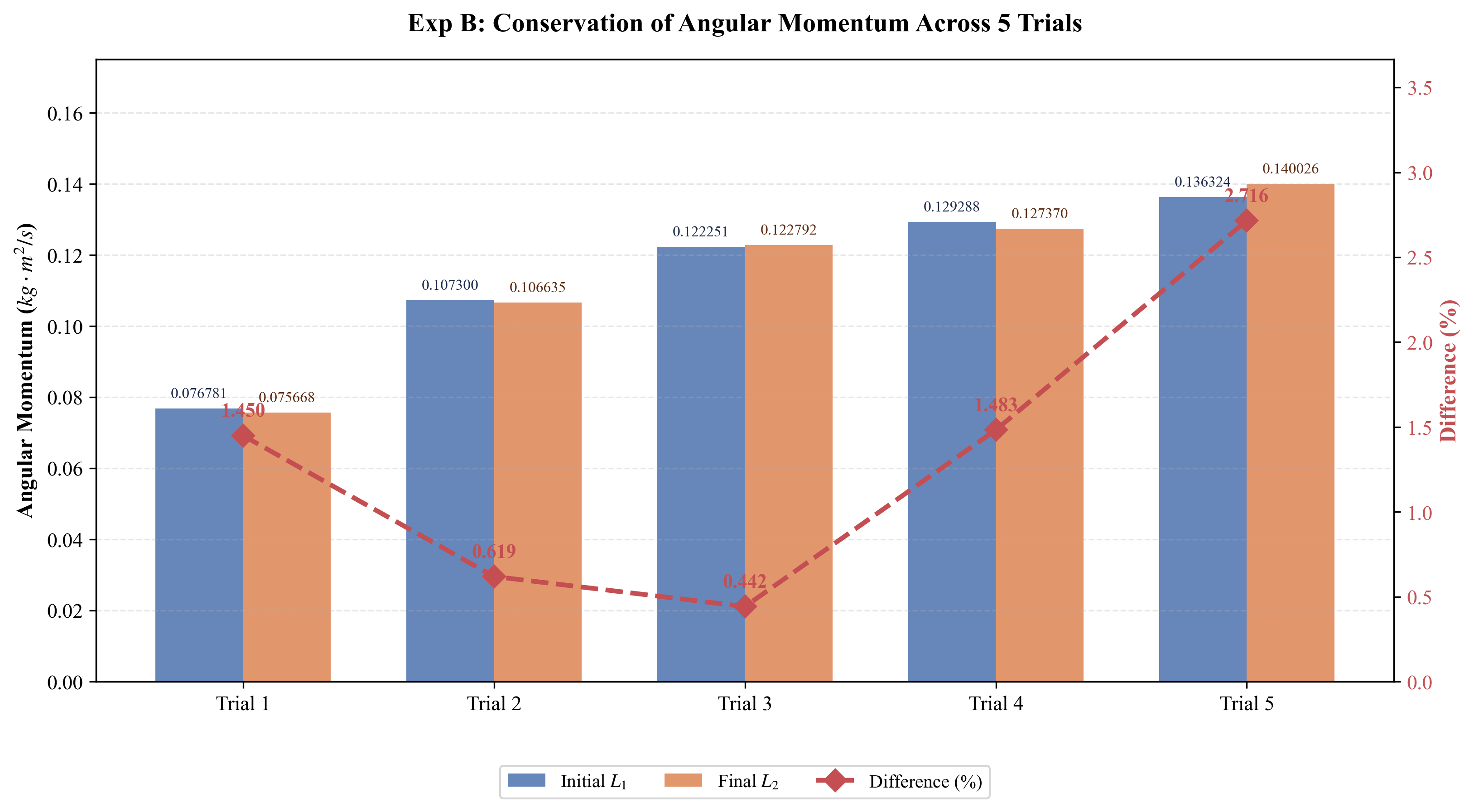
Dies ist der Höhepunkt des Experiments: In allen fünf Versuchen stimmen die anfänglichen Drehimpulse $L_1$ und die späteren Drehimpulse $L_2$ nahezu überein. Die auf der rechten Achse dargestellte Fehlerkurve variiert zwischen 0.44% und 2.71% und weist einen beeindruckenden Mittelwert von **1.34%** auf.
Dies zeigt numerisch, dass trotz des starken Abfalls der Winkelgeschwindigkeit von $\omega_1$ auf $\omega_2$ der Anstieg des Trägheitsmoments ($I_{disk} \to I_{total}$) dies ausgleicht, sodass die Beziehung $I_{disk}\omega_1 = I_{total}\omega_2$ innerhalb der Messgenauigkeit erfüllt ist.
Geringfügige Restabweichungen (ca. 1.3%) können verursacht werden durch:
- **Reibungsmomente (Frictional Torque):** Während der kurzen Phase, in der der Ring auf der Scheibe sitzt und die Geschwindigkeit sich auf $\omega_2$ stabilisiert, wirken Lagerreibung und Luftwiderstand als negative Momente und reduzieren den Drehimpuls geringfügig.
- **Unzentrierter Aufprall beim Abwurf:** Wird der Ring nicht genau zentriert abgeworfen, kann ein Versatz $d$ zur Anwendung des Parallelachsen-Theorems ($I = I_{cm} + Md^2$) führen und das effektive Trägheitsmoment vergrößern, was zu kleinen Abweichungen in der Winkelgeschwindigkeit führt.
## 6.4 Zusammenfassung und Schlussfolgerungen
Aus dem Experiment ergeben sich folgende Feststellungen:
1. Die Masse und die geometrische Verteilung (Radius) eines starren Körpers bestimmen sein Trägheitsmoment; dies wurde quantitativ durch die experimentelle Formel $I = mr^2 (\frac{g}{r\alpha} - 1)$ bestätigt (Fehlerbereich ca. 5–6%).
2. In einem isolierten System ohne äußeres resultierendes Drehmoment bleibt der Gesamt-Drehimpuls erhalten, auch wenn sich die Massenverteilung durch das Aufbringen des Rings ändert; dies wurde mit einem mittleren Fehler von **1.34%** nachgewiesen.
3. Bei der Datenanalyse wurde ein kritischer Bedienerfehler entdeckt und korrigiert: anfangs wurde fälschlicherweise der Durchmesser der Achse anstelle des Radius verwendet, was zu Fehlern >80% führte. Dies unterstreicht die Wichtigkeit sorgfältiger Datenüberprüfung und die hohe Sensitivität quadrierter Terme wie $r$.
## 6.5 Python-Quellcode (Datenvisualisierungs-Algorithmus)
Die wichtigste Visualisierungsfunktion zur Erstellung von Dual-Axis-Kombinationsdiagrammen, die in diesem Bericht verwendet wurde, lautet:
import csv
import matplotlib.pyplot as plt
import numpy as np
import os
plt.rcParams['font.family'] = 'serif'
plt.rcParams['font.serif'] = ['Times New Roman', 'DejaVu Serif']
plt.rcParams['mathtext.fontset'] = 'stix'
plt.rcParams['axes.labelsize'] = 12
plt.rcParams['axes.titlesize'] = 14
plt.rcParams['xtick.labelsize'] = 11
plt.rcParams['ytick.labelsize'] = 11
plt.rcParams['legend.fontsize'] = 10
def plot_combo_chart(x_labels, bar1, label1, bar2, label2, line_data, line_label, title, y_left, y_right, filename):
"""
Helper function to generate a dual-axis combination chart.
Bars: 6 decimal places (smaller font).
Line: 3 decimal places (slightly larger, bolder font).
"""
fig, ax1 = plt.subplots(figsize=(11, 6.5))
x = np.arange(len(x_labels))
width = 0.35
rects1 = ax1.bar(x - width/2, bar1, width, label=label1, color='#4C72B0', alpha=0.85)
rects2 = ax1.bar(x + width/2, bar2, width, label=label2, color='#DD8452', alpha=0.85)
ax1.set_ylabel(y_left, fontweight='bold')
ax1.set_xticks(x)
ax1.set_xticklabels(x_labels)
ax1.bar_label(rects1, fmt='%.6f', padding=4, fontsize=8, color='#1b2a49')
ax1.bar_label(rects2, fmt='%.6f', padding=4, fontsize=8, color='#5c2a11')
max_bar_val = max(max(bar1), max(bar2))
if max_bar_val > 0:
ax1.set_ylim(0, max_bar_val * 1.25)
ax2 = ax1.twinx()
line = ax2.plot(x, line_data, color='#C44E52', marker='D', linestyle='--', linewidth=2.5, markersize=8, label=line_label)
ax2.set_ylabel(y_right, color='#C44E52', fontweight='bold')
ax2.tick_params(axis='y', labelcolor='#C44E52')
for i, val in enumerate(line_data):
if not np.isnan(val):
ax2.annotate(f'{val:.3f}',
(x[i], val),
textcoords="offset points",
xytext=(0, 10),
ha='center',
fontsize=10.5,
color='#C44E52',
fontweight='bold')
max_line_val = max([v for v in line_data if not np.isnan(v)] or [0])
if max_line_val > 0:
ax2.set_ylim(0, max_line_val * 1.35)
> Der vollständige Quellcode einschließlich Datenparsing und Vorverarbeitung ist in der beigefügten `main.py` referenziert.
# 7. Versuchshinweise
Da in diesem Versuch feinste Änderungen im Rotationssystem behandelt werden, sind zur Minimierung geometrischer Fehler und Reibung die folgenden Punkte strikt einzuhalten.
## 7.1 Ausrichten der Rotationsvorrichtung (Leveling)
Stelle die Wasserwaage am Sockel des Rotationsständers so ein, dass die Blase zentriert ist. Ist die Apparatur nicht eben, kann sich die Achse der Scheibe neigen, und Gravitationskomponenten können eine unerwünschte zusätzliche resultierende Drehmomentwirkung erzeugen, was zu erheblichen systematischen Fehlern bei der Messung der Winkelbeschleunigung führt.
## 7.2 Vermeidung von Fadenüberlagerung und Ausrichtung (String Winding & Alignment)
Beim Aufwickeln des Fadens auf die Achse (3-stufige Rolle) darauf achten, dass der Faden nicht überlappt und sauber in einer Reihe liegt. Überlappender Faden verändert den effektiven Achsenradius $r$ um die Fadendicke. Da $r$ quadratisch in die Versuchsgleichung $I = mr^2 (\frac{g}{r\alpha} - 1)$ eingeht, kann eine kleine Radiusänderung große Abweichungen im ermittelten Trägheitsmoment verursachen. Außerdem ist die Rolle so zu justieren, dass der Faden beim Übergang zur Smart Pulley horizontal liegt, damit die Spannung rein tangential wirkt.
## 7.3 Zentrischer Aufprall beim Ringabwurf (Centering the Mass Ring)
Beim Abwurf des Rings auf die rotierende Scheibe (Experiment B) sicherstellen, dass der Ring genau in der zentralen Führungsnut sitzt. Ein Versatz um $d$ bewirkt gemäß dem Parallelachsen-Theorem ($I = I_{cm} + Md^2$) ein unerwartet erhöhtes Trägheitsmoment, was zu großen Fehlern in der Nachberechnung des Drehimpulses führt.
## 7.4 Minimierung äußerer Drehmomente (Minimizing External Torque)
Beim Abwurf des Rings darauf achten, keine tangentiale Kraft oder starken Druck auszuüben. Der Ring soll nur unter der Wirkung der Schwerkraft „fallen gelassen" werden; außer Reibung sollten keine äußeren Drehmomente in das System eingebracht werden, um die reine Drehimpulserhaltung zu beobachten.
## 7.5 Sicherstellung ausreichender Fallhöhe für die hängende Masse (Safety of Hanging Mass)
Während Experiment A darauf achten, dass die fallende Masse nicht auf den Boden oder das Smart Gate aufschlägt. Ein Aufprall würde die Spannung $T$ abrupt auf Null setzen oder einen Rückprall verursachen und damit den linearen Bereich der Winkelbeschleunigung zerstören. Die Datenerfassung sollte unmittelbar vor dem Auftreffen enden; die Masse sicher per Hand oder Polster auffangen.
# 8. Literaturverzeichnis
[1] 慶熙大学 (Kyung Hee University), "E1-05 Conservation of Angular Momentum," APHY1002-11 Physics and Experiment 1 laboratory materials (PDF), n.d.
[2] 慶熙大学 (Kyung Hee University), "E1-05_Conservation of Angular Momentum," APHY1002-11 Physics and Experiment 1 laboratory materials (PDF), n.d.
[3] 慶熙大学 (Kyung Hee University), "EXP05_Conservation_of_Angular_Momentum," APHY1002-11 Physics and Experiment 1 data sheet (CSV), 2026.
[4] 慶熙大学 (Kyung Hee University), "Physics Lab OT - Lee Geonbin," APHY1002-11 Physics and Experiment 1 orientation materials (PDF), n.d.
[5] Mao Junjian, Gu Mu, University Physics (3rd Edition, Vol. 1), Higher Education Press, 2020, ISBN: 9787040548822.
Comments NOTHING