发布于 2026-06-05
摘要
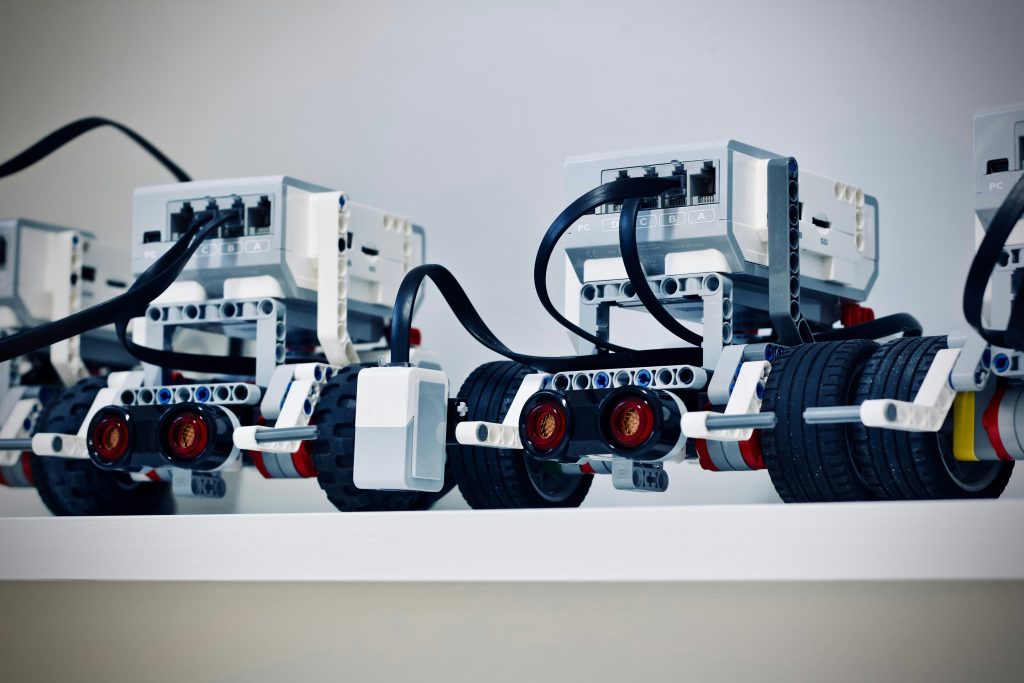
本项目设计并实现了一款基于LEGO MINDSTORMS EV3平台的智能寻迹与物料搬运机器人。针对复杂赛道中的多岔路口识别、动态寻迹以及特定物料的抓取需求,本系统在底层运动控制中引入了基于离散时间系统的改进型比例-微分(PD)控制算法,结合差速驱动运动学模型,实现了机器人平滑且自适应的轨迹跟踪。在宏观路径规划与任务执行中,构建了基于布尔逻辑与有限状态机(FSM)的确定性决策树模型,解决了"传感器致盲"、"路口误判"以及"假阳性终点"等典型工程难题。本文详细阐述了该系统的控制理论基础、算法数学推导、软硬件协同设计,并结合控制论历史与相关实证研究,对比了不同控制器在直线、椭圆以及8字形复杂轨迹下的性能表现。同时,针对嵌入式系统物理特性(如CPU饥饿、PWM控制响应)提出了底层算力优化方案$^{[1]}$。