
**Download Files:**
Moment of Inertia & Angular Momentum Conservation.pptx
Moment of Inertia & Angular Momentum Conservation.pdf
# 1.实验标题
本次实验的主题是**转动惯量测定与角动量守恒**。
# 2. 实验目的
通过测量旋转刚体(Rigid Body)的角加速度(Angular Acceleration),以实验方式确定该物体的**转动惯量(Moment of Inertia)**,并与基于几何结构计算的理论值进行比较,以理解旋转运动的力学原理。同时,以实验方式验证当外部扭矩不作用于旋转系统时,**角动量(Angular Momentum)**得以守恒,并在此过程中考察能量的变化。
# 3. 相关理论
## 3.1 转动惯量 (Moment of Inertia)
在旋转运动的物体中,对应于直线运动中的"质量(Mass)"的物理量,表示物体保持其旋转状态的性质大小。当质量为$m_i$的粒子距旋转轴为$r_i$时,转动惯量$I$定义如下:
$$I = \sum m_i r_i^2$$
对于具有连续质量分布的刚体,通过对微小质量$dm$进行积分(Integral)来求得。
$$I = \int r^2 dm$$
### 3.1.1 圆盘(Disk)与圆环(Ring)的转动惯量推导 (证明)
#### 3.1.1.1 均匀圆盘 (Solid Disk)
求半径为$R$、总质量为$M$的均匀圆盘对其中心轴的转动惯量。圆盘的面密度(Surface density)为$\sigma = \frac{M}{\pi R^2}$。
设半径为$r$、厚度为$dr$的微小圆环,则微小面积$dA = 2\pi r dr$,微小质量$dm = \sigma dA = \frac{M}{\pi R^2} \cdot 2\pi r dr$。
$$I_{disk} = \int_0^R r^2 dm = \int_0^R r^2 \left( \frac{2Mr}{R^2} \right) dr = \frac{2M}{R^2} \int_0^R r^3 dr$$
$$I_{disk} = \frac{2M}{R^2} \left[ \frac{r^4}{4} \right]_0^R = \frac{2M}{R^2} \cdot \frac{R^4}{4} = \frac{1}{2}MR^2$$
#### 3.1.1.2 厚圆环 (Thick Ring)
求内半径(Inner radius)为$R_1$、外半径(Outer radius)为$R_2$、质量为$M$的圆环的转动惯量。面密度(Surface density)为$\sigma = \frac{M}{\pi(R_2^2 - R_1^2)}$。
$$I_{ring} = \int_{R_1}^{R_2} r^2 \left( \frac{2Mr}{R_2^2 - R_1^2} \right) dr = \frac{2M}{R_2^2 - R_1^2} \left[ \frac{r^4}{4} \right]_{R_1}^{R_2}$$
$$I_{ring} = \frac{2M}{R_2^2 - R_1^2} \cdot \frac{R_2^4 - R_1^4}{4} = \frac{M}{2(R_2^2 - R_1^2)}(R_2^2 - R_1^2)(R_2^2 + R_1^2)$$
$$I_{ring} = \frac{1}{2}M(R_1^2 + R_2^2)$$
## 3.2 角动量与扭矩的关系推导 (牛顿第二定律的旋转变换)
为了从力学上解释旋转运动,将平移运动的基本规律牛顿第二定律($F = ma$)转换成旋转运动的形式。
对于单个质量为$m$的粒子,牛顿第二定律的微分形式可用线动量($p = mv$)的时间变化率定义如下:
$$F = \frac{dp}{dt} = m\frac{dv}{dt}$$
当该粒子从原点处位置矢量为$r$时,作用在粒子上的扭矩(Torque, $\tau$)定义为位置矢量与力矢量的叉积(Cross Product, Outer Product):
$$\tau = r \times F$$
将上式中的$F$代入牛顿第二定律的微分形式,得:
$$\tau = r \times \frac{dp}{dt} \tag{1}$$
另一方面,粒子的角动量(Angular Momentum, $L$)定义为位置矢量与线动量(Linear Momentum)的叉积:
$$L = r \times p$$
对该角动量关于时间$t$进行微分。根据微分的乘积法则,可得:
$$\frac{dL}{dt} = \frac{d}{dt}(r \times p) = \left( \frac{dr}{dt} \times p \right) + \left( r \times \frac{dp}{dt} \right)$$
其中$\frac{dr}{dt}$为粒子的速度$v$,线动量$p = mv$。速度矢量$v$与平行于自身的$mv$的叉积为0($v \times mv = 0$)。因此第一项被消去,仅保留第二项。
$$\frac{dL}{dt} = r \times \frac{dp}{dt} \tag{2}$$
比较式(1)与式(2),推导出扭矩与角动量之间的基本关系。即,系统所受的合扭矩等于角动量的时间变化率。
$$\tau = \frac{dL}{dt} \tag{3}$$
现在将此关系扩展到绕固定轴旋转的刚体。当刚体以角速度$\omega$旋转时,每个粒子的速度为$v = r\omega$(标量形式),因此角动量$L$可表示为:
$$L = r \cdot p = r(mv) = mr^2\omega$$
其中$mr^2$为粒子的转动惯量$I$,因此成立$L = I\omega$。将其代入式(3),关于时间求微分,得:
$$\tau = \frac{d}{dt}(I\omega) = I\frac{d\omega}{dt} = I\alpha \tag{4}$$
最终推导出与平移运动的$F = m\frac{dv}{dt}$完全对应的旋转运动的运动方程:
$$\tau = r \times F = I\alpha = \frac{dL}{dt}$$
此方程是本实验中通过测量原盘和环的旋转加速度($\alpha$)来反推转动惯量($I$)的核心数学依据。
## 3.3 旋转运动动能 (Rotational Kinetic Energy) 及推导
就如同平移运动(Translational motion)物体的动能由质量和速度决定一样,围绕固定轴旋转的刚体的动能也可通过转动惯量和角速度来定义。这称为旋转运动动能(Rotational Kinetic Energy),可通过将平移运动动能的基本定义应用于旋转刚体的每个微小质量来推导。
### 3.3.1 推导过程
设某刚体围绕固定旋转轴以角速度$\omega$旋转。该刚体可视为由许多微小粒子组成。
设质量为$m_i$的第$i$个粒子距旋转轴的垂直距离为$r_i$,其线速度$v_i$与角速度$\omega$的关系为:
$$v_i = r_i \omega$$
该第$i$个粒子的平移运动动能$K_i$根据牛顿力学的基本定义为:
$$K_i = \frac{1}{2}m_i v_i^2$$
将$v_i = r_i \omega$代入并整理,得:
$$K_i = \frac{1}{2}m_i (r_i \omega)^2 = \frac{1}{2} m_i r_i^2 \omega^2$$
刚体整体的旋转运动动能$K_{rot}$等于组成该刚体所有粒子的动能之和。若刚体保持完整形态的刚体(Rigid body),旋转时所有粒子共享同一角速度$\omega$,因此$\omega$可从求和符号($\sum$)外提出。
$$K_{rot} = \sum_{i} K_i = \sum_{i} \left( \frac{1}{2} m_i r_i^2 \omega^2 \right)$$
$$K_{rot} = \frac{1}{2} \left( \sum_{i} m_i r_i^2 \right) \omega^2$$
此时括号内的式子$\sum_{i} m_i r_i^2$与第3.1节中定义的转动惯量(Moment of Inertia, $I$)相同。
因此,将括号部分代换为$I$,完成最终的旋转运动动能公式:
$$K_{rot} = \frac{1}{2}I\omega^2$$
这个结果与平移运动动能公式$K = \frac{1}{2}mv^2$形成完美的数学对称。即,在旋转运动中,质量$m$由转动惯量$I$取代,线速度$v$由角速度$\omega$取代,其作用完全相同。
### 3.3.2 本实验中的物理意义
在本实验的"实验B(角动量守恒)"中,将质量环扔到旋转圆盘上的过程,由于不存在外部扭矩,角动量($L$)得以守恒,但由于内部摩擦力使两个物体最终以相同的角速度旋转,这在力学上等同于完全非弹性碰撞(Perfectly inelastic collision)。因此,利用此公式可计算碰撞前后的旋转运动动能,证明即使角动量得以守恒,运动动能也会因摩擦热等而损失($\Delta K_{rot} < 0$)。
## 3.4 角动量守恒定律 (Conservation of Angular Momentum)
当系统所受外力产生的合扭矩为0时($\tau_{ext} = 0$),系统的总角动量保持不变。
$$\frac{dL}{dt} = 0 \implies L = I_i \omega_i = I_f \omega_f = \text{Constant}$$
在本实验中,将质量环放在旋转圆盘上,使转动惯量从$I_i \to I_f$变化时,通过观察角速度从$\omega_i \to \omega_f$的变化过程来验证此原理。
## 3.5 实验性转动惯量测定原理及公式推导
本实验采用在旋转轴(半径$r$)上缠绕绳子,绳子末端悬挂质量为$m$的砝码并使其自由下落的方式。当砝码在重力作用下加速下落时,会牵拉绳子,此张力(Tension, $T$)会在旋转轴处产生扭矩,引发整个系统的旋转运动。将此力学过程用数式分解如下。
### 3.5.1 砝码的平移运动方程 (Translational Equation of Motion)
作用在下落质量$m$砝码上的合力为竖直向下的重力$mg$与竖直向上的绳子张力$T$。设砝码下落方向为正(+),则根据牛顿第二定律,线加速度$a$的运动方程如下:
$$mg - T = ma \tag{1}$$
### 3.5.2 刚体的旋转运动方程 (Rotational Equation of Motion)
拉动旋转轴的绳子张力$T$沿半径为$r$的旋转轴切线方向作用,形成合扭矩$\tau$。设旋转体的总转动惯量为$I$,角加速度为$\alpha$,则扭矩方程如下。(因为张力作用线与半径矢量互相垂直,故$\sin 90^\circ = 1$。)
$$\tau = r \times T = rT = I\alpha \tag{2}$$
### 3.5.3 线加速度与角加速度的约束条件 (Kinematic Constraint)
假设在理想状态下绳子不伸长或不在旋转轴上滑动,则砝码的线加速度$a$与旋转轴表面的切线加速度完全相同。因此线运动与旋转运动之间存在以下几何关系:
$$a = r\alpha \tag{3}$$
### 3.5.4 公式推导展开过程
通过联立上述三个方程,可推导出我们实验中欲求的转动惯量$I$的表达式。
首先,将式(3)的约束条件$a = r\alpha$代入式(1),整理关于张力$T$的式子:
$$mg - T = m(r\alpha)$$
$$T = m(g - r\alpha) \tag{4}$$
将推导出的张力$T$代入式(2)的旋转运动方程:
$$r \cdot \left[ m(g - r\alpha) \right] = I\alpha$$
展开左边的括号,得:
$$mgr - mr^2\alpha = I\alpha$$
为了以我们的最终目标转动惯量$I$来整理式子,两边同除以角加速度$\alpha$:
$$I = \frac{mgr - mr^2\alpha}{\alpha} = \frac{mgr}{\alpha} - mr^2$$
最后,用共同项$mr^2$将右边提取,完成最终的转动惯量实验式:
$$I = mr^2 \left( \frac{g}{r\alpha} - 1 \right)$$
通过此推导公式,我们可仅代入实验室中直接测定的几何常数(砝码质量$m$、旋转轴半径$r$)和重力加速度$g$,以及通过SPARKvue数据采集软件通过线性回归(Linear Fit)获得的**角加速度(Angular Acceleration)**$\alpha$值,就可定量确定复杂形式的刚体转动惯量$I$。
# 4. 实验方法
本实验分为两个主要部分进行。**实验A**中测定砝码下落引起的圆盘和圆环的转动惯量,**实验B**中通过向旋转圆盘上放置圆环来验证角动量是否守恒。
## 4.1 实验A 转动惯量测定(Measurement of Moment of Inertia)
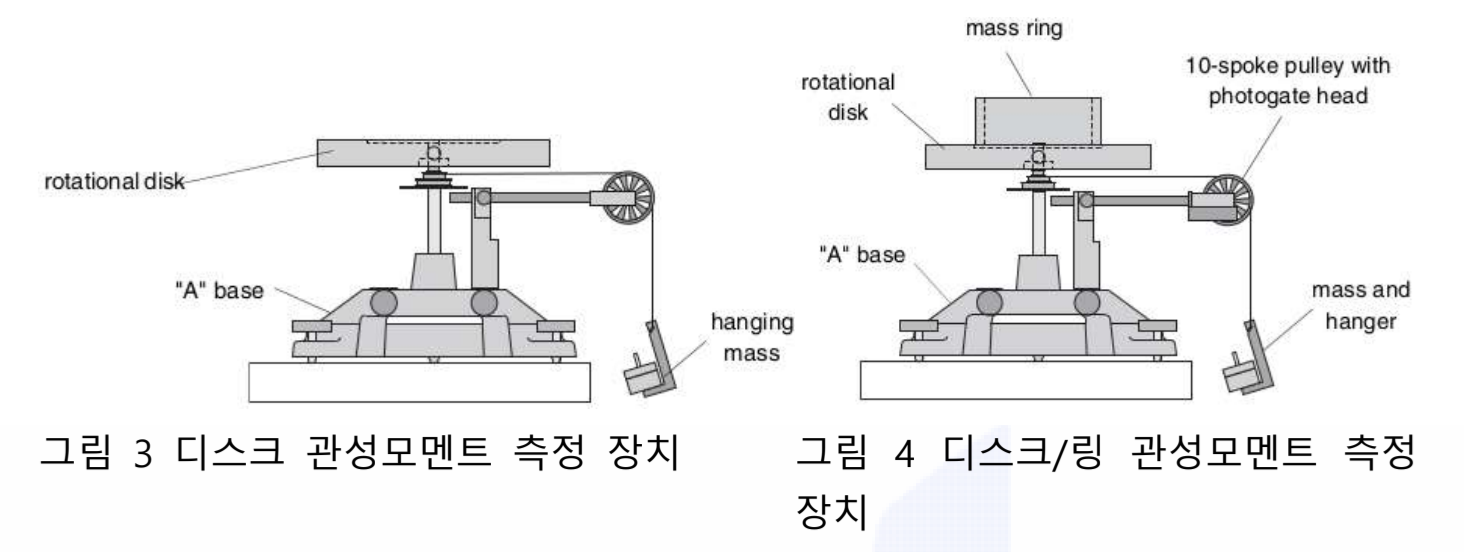
1. **旋转装置安装**:如[图3]所示,安装旋转立架,并将圆盘(Rotational Disk)连接到旋转轴。使用水平仪(Leveler)精确调整旋转立架和圆盘的水平。
2. **智能门设置**:将智能门(Smart Gate)固定到旋转立架。此时调整位置,使智能门的传感器能精确感知连接到旋转轴的滑轮(Pulley)的沟槽(Spoke)。
3. **基础数据测定**:用电子秤测定砝码和砝码架的总质量$m$,用游标卡尺(Vernier Calipers)精密测定绳子缠绕的旋转轴半径$r$。
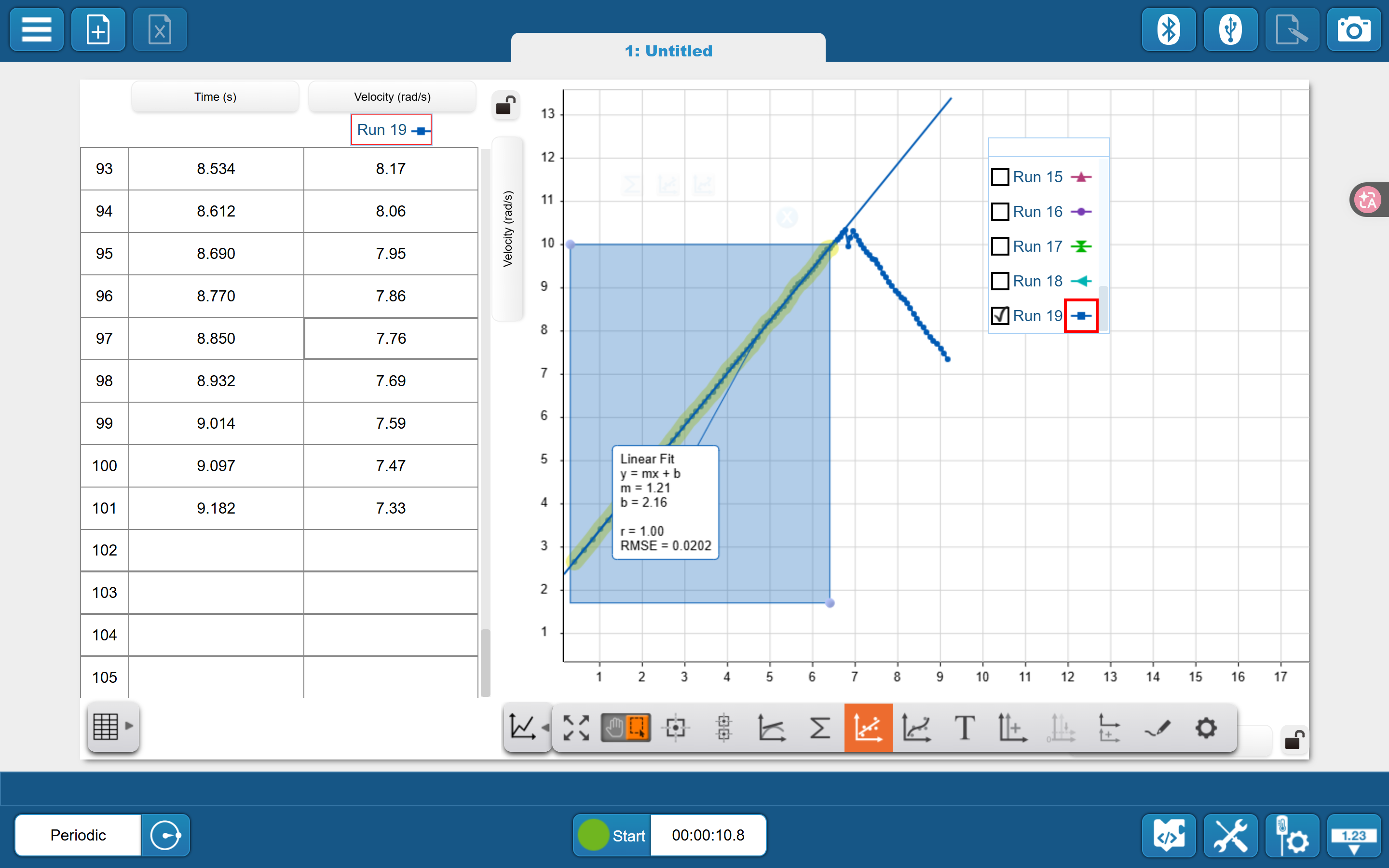
4. **软件准备**:运行SPARKvue应用,选择**[Smart Gate Only]** -> [Smart Pulley (Rotational)]。将**Spoke Angle**设置为$36^\circ$(或符合装置的值),选择**Velocity**和**Acceleration**作为测量物理量。
5. **圆盘角加速度测定**:缠绕绳子并使砝码下落的同时测定角速度。在数据图表中选择角加速度($\alpha$)为常数的区间,进行线性回归(Linear Fit),并记录其斜率值。
6. **重复测定**:将步骤5重复总共5次,求出圆盘的平均角加速度,据此计算$I_{disk}$。
7. **圆环(Mass Ring)添加**:将圆环放到圆盘上,重复步骤5~6。此时测定的值为圆盘与圆环的合成转动惯量($I_{total}$),从中减去之前求得的$I_{disk}$,推导$I_{ring}$的实验值。
## 4.2 实验B 角动量守恒(Conservation of Angular Momentum)
1. **装置重新整列**:移除在实验A中使用的绳子和砝码。系统应处于无外部扭矩的自由旋转状态。
2. **初始旋转及测定开始**:用手轻轻转动圆盘使其旋转,然后按下SPARKvue的测定(Start)按钮。
3. **初始角速度($\omega_1$)测定**:当圆盘稳定旋转时,记录圆环放下前的角速度$\omega_1$。
4. **圆环投放**:沿圆盘的旋转轴方向小心放下圆环。此时注意使圆环精确坐落在圆盘的中心。
5. **之后角速度($\omega_2$)测定**:圆环坐落后,记录圆盘与圆环共同稳定旋转时的角速度$\omega_2$。
6. **数据分析**:使用测定的$\omega_1, \omega_2$和实验A中获得的$I_{disk}, I_{total}$计算碰撞前后的角动量$L_1, L_2$,确认是否守恒。
7. **重复测定**:将步骤2~6重复总共5次,确保数据的可信度。
# 5. 实验结果
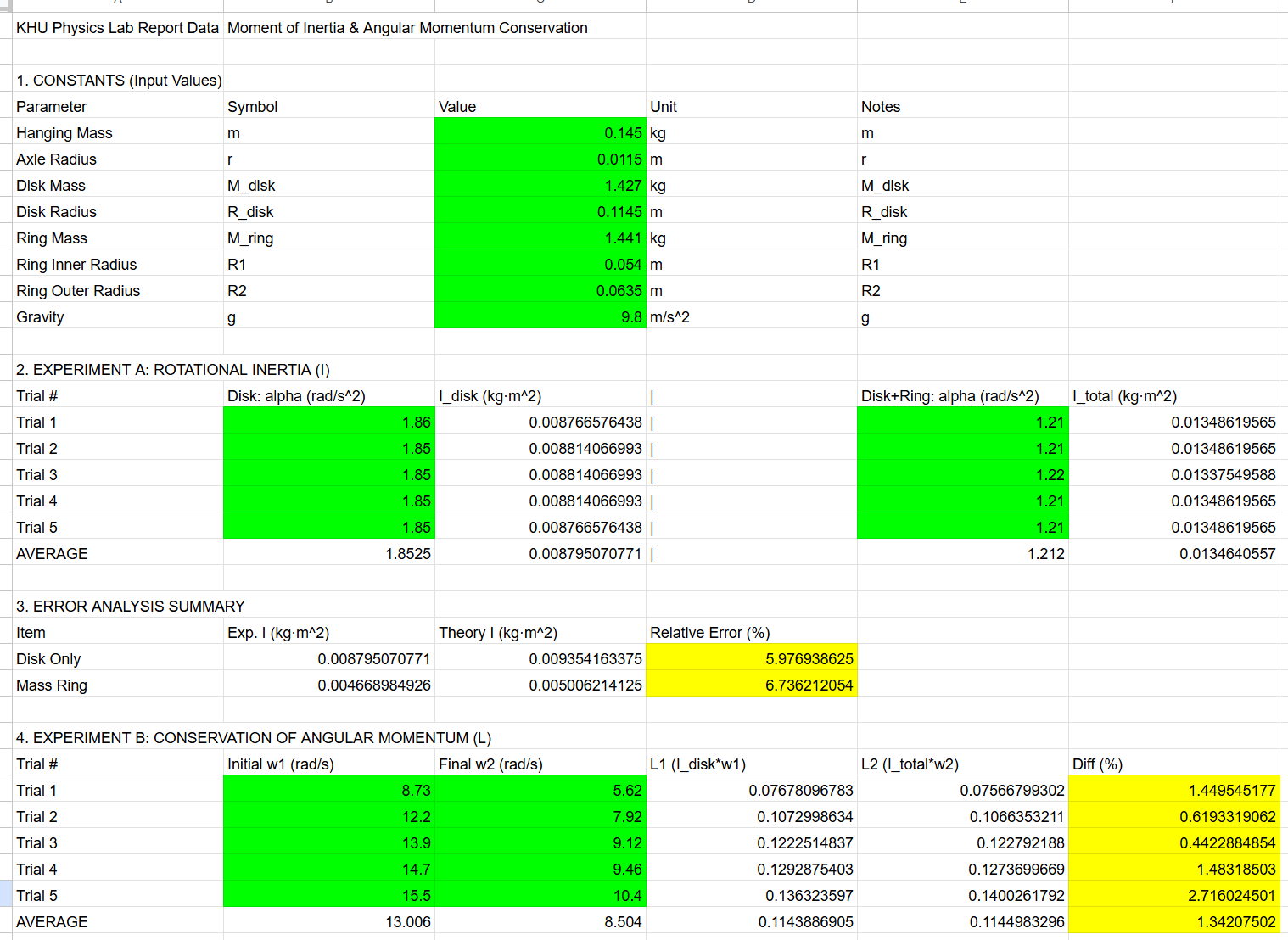
## 5.1 实验基本参数 (Constants)
在实验A和B的计算中共同使用的几何常数及质量测定值如下。
| 参数 (Parameter) | 符号 (Symbol) | 测定值 (Value) | 单位 (Unit) |
|---|---|---|---|
| 砝码质量 (Hanging Mass) | $m$ | 0.145 | $\text{kg}$ |
| 旋转轴半径 (Axle Radius) | $r$ | 0.0115 | $\text{m}$ |
| 圆盘质量 (Disk Mass) | $M_{disk}$ | 1.427 | $\text{kg}$ |
| 圆盘半径 (Disk Radius) | $R_{disk}$ | 0.1145 | $\text{m}$ |
| 圆环质量 (Ring Mass) | $M_{ring}$ | 1.441 | $\text{kg}$ |
| 圆环内径 (Ring Inner Radius) | $R_1$ | 0.054 | $\text{m}$ |
| 圆环外径 (Ring Outer Radius) | $R_2$ | 0.0635 | $\text{m}$ |
| 重力加速度 (Gravity) | $g$ | 9.8 | $\text{m/s}^2$ |
## 5.2 实验A 转动惯量测定 (Rotational Inertia)
### 5.2.1 测定数据及实验值计算
对圆盘单独旋转和圆盘+圆环重叠旋转分别进行5次砝码下落,测定角加速度($\alpha$)。实验转动惯量利用式$I = mr^2 (\frac{g}{r\alpha} - 1)$推导。圆环单独的转动惯量实验值通过从总转动惯量中减去圆盘的转动惯量($I_{ring} = I_{total} - I_{disk}$)计算。
| 测定次数 $(Trial)$ | 圆盘 $α (rad/s^2)$ | 圆盘 $I_{disk} (kg \cdot m^2)$ | 圆盘+圆环 $α (rad/s^2)$ | 总转动惯量 $I_{total} (kg \cdot m^2)$ |
|---|---|---|---|---|
| Trial 1 | 1.860 | 0.008767 | 1.210 | 0.013486 |
| Trial 2 | 1.850 | 0.008814 | 1.210 | 0.013486 |
| Trial 3 | 1.850 | 0.008814 | 1.220 | 0.013375 |
| Trial 4 | 1.850 | 0.008814 | 1.210 | 0.013486 |
| Trial 5 | 1.850 | 0.008767 | 1.210 | 0.013486 |
| 平均 (AVERAGE) | 1.8525 | 0.008795 | 1.2120 | 0.013464 |
### 5.2.2 误差分析 (Error Analysis Summary)
圆盘和圆环的理论转动惯量分别使用$I_{disk} = \frac{1}{2}MR^2$、$I_{ring} = \frac{1}{2}M(R_1^2 + R_2^2)$公式计算,与实验平均值进行比较。
| 项目 $(Item)$ | 实验值 $I_{exp} (kg \cdot m^2)$ | 理论值 $I_{theo} (kg \cdot m^2)$ | 相对误差率 $(\%)$ |
|---|---|---|---|
| 圆盘 (Disk Only) | 0.008795 | 0.009354 | 5.977 |
| 圆环 (Mass Ring) | 0.004669 | 0.005006 | 6.736 |
_※ 圆环的实验值$I_{ring}$通过(总转动惯量平均0.013464) - (圆盘转动惯量平均0.008795) = 0.004669 计算。_
## 5.3 实验B 角动量守恒 (Conservation of Angular Momentum)
对旋转圆盘上放置圆环的完全非弹性碰撞实验重复进行5次。计算碰撞前的初始角动量$L_1 = I_{disk} \cdot \omega_1$和碰撞后的之后角动量$L_2 = I_{total} \cdot \omega_2$,确认两值的差异。
_(注意:角动量计算时使用的转动惯量$I$采用实验A中获得的实验平均值。)_
| 测定次数 $(Trial)$ | 初始 $ω_1 (rad/s)$ | 之后 $ω_2 (rad/s)$ | 初始 $L_1 (kg \cdot m^2/s)$ | 之后 $L_2 (kg⋅m2/s)$ | 误差率 $(\%)$ |
|---|---|---|---|---|---|
| Trial 1 | 8.730 | 5.620 | 0.076781 | 0.075668 | 1.450 |
| Trial 2 | 12.200 | 7.920 | 0.107300 | 0.106635 | 0.619 |
| Trial 3 | 13.900 | 9.120 | 0.122251 | 0.122792 | 0.442 |
| Trial 4 | 14.700 | 9.460 | 0.129288 | 0.127370 | 1.483 |
| Trial 5 | 15.500 | 10.400 | 0.136324 | 0.140026 | 2.716 |
| 平均 (AVERAGE) | 13.006 | 8.504 | 0.114389 | 0.114498 | 1.342 |
_※ 误差率计算式:$\delta = \frac{\|L_1 - L_2\|}{L_1} \times 100 \%$_
# 6.分析及讨论
在本分析中,为了对实验A(转动惯量测定)和实验B(角动量守恒)的测定值及理论值进行定量和可视化比较,采用了基于Python的数据分析及可视化算法。通过这一方式,用双轴(Dual-axis)组合图表实现了绝对物理量的比较(条形图)和相对误差的变动趋势(折线图)的直观分析,进而对数据的可信度和系统误差进行了综合评估。
转动惯量实验值$I_{exp}$与理论值$I_{theo}$之间的相对误差率$\delta_I$,以及碰撞前后的角动量误差率$\delta_L$定义如下,应用于分析。
$$\delta_I(\%) = \frac{|I_{exp} - I_{theo}|}{I_{theo}} \times 100\%, \qquad \delta_L(\%) = \frac{|L_1 - L_2|}{L_1} \times 100\%$$
## 6.1 实验A:圆盘转动惯量精密比较 (Disk Only)
第一幅图展示了5次圆盘(Disk)单独旋转实验中测定的转动惯量实验值与基于几何参数的理论值的比较。
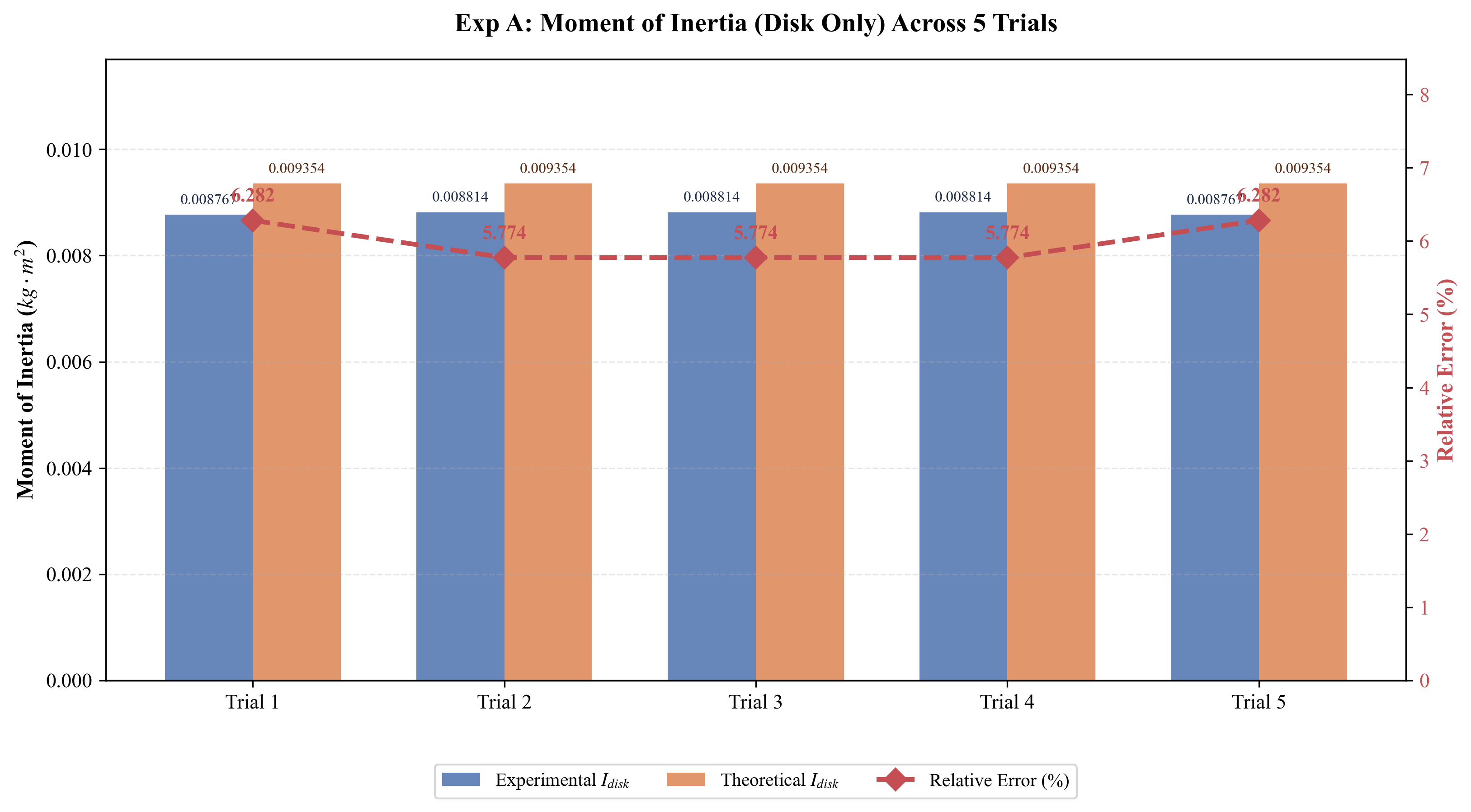
从图表分析来看,5次Trial中测定的实验值(蓝色条形)始终略低于理论值(橙色条形)。因此,用红色虚线表示的相对误差率保持在约**5.97%**的非常稳定水平。
数据的分散度(变动性)极低,说明实验者的下落操作、通过SPARKvue的角加速度($\alpha$)测定以及线性回归(Linear fit)过程都是极为精密进行的。即,这约6%的误差应理解为由实验装置自身的结构因素导致的**系统误差(Systematic Error)**,而非随机误差(Random Error)。
## 6.2 实验A:圆环转动惯量精密比较 (Mass Ring)
第二幅图展示了圆盘和圆环结合状态下测定的总转动惯量($I_{total}$)减去圆盘转动惯量($I_{disk}$)后得出的圆环(Ring)单独实验值与理论值的比较结果。
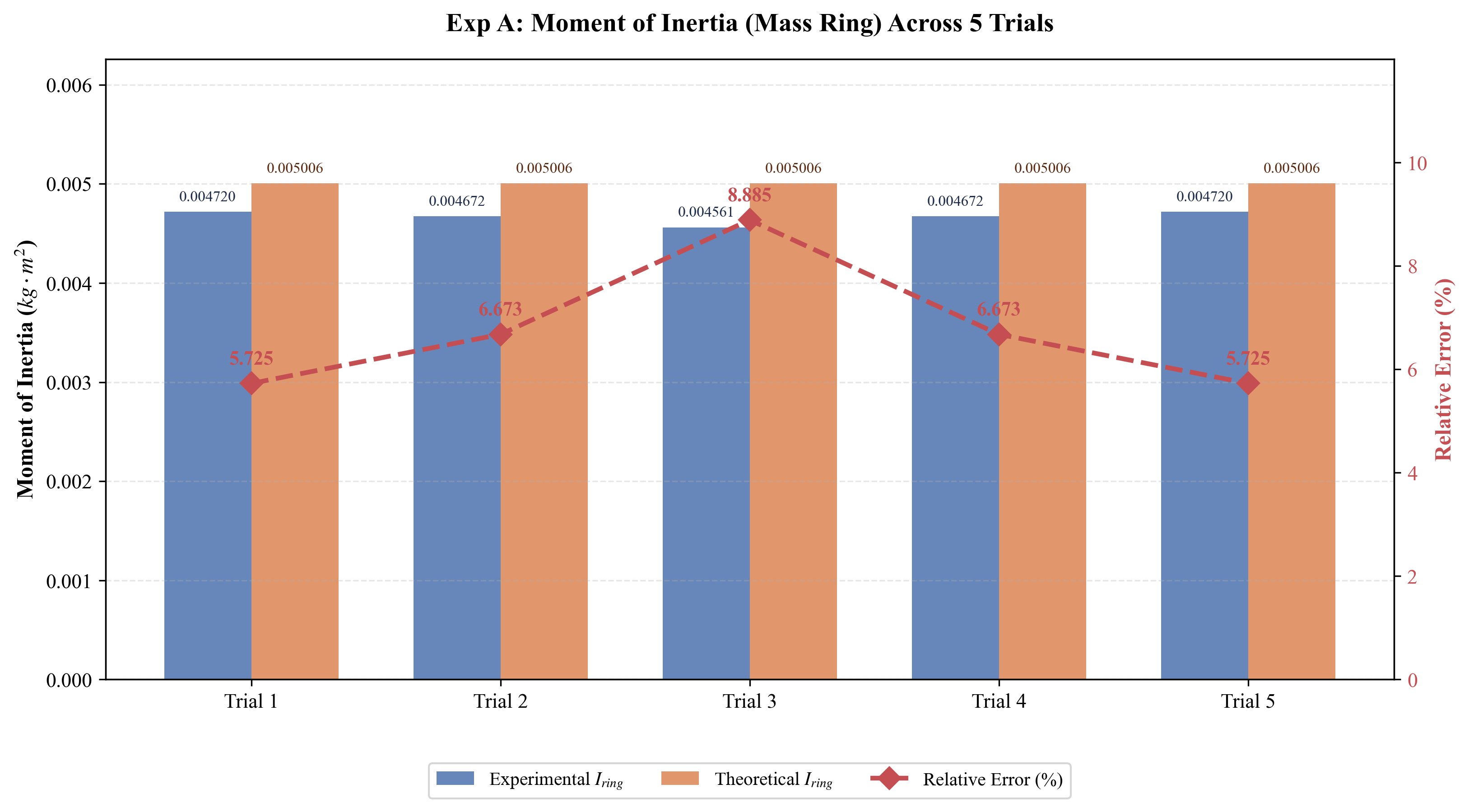
圆环的转动惯量误差率同样约为**6.73%**,展现了与圆盘实验相似的趋势性和稳定的误差范围。实验A全程中实验值比理论值小约6%(计算为$I_{exp} < I_{theo}$)的原因可通过以下两个方面进行深入分析。
1. **绳子厚度导致的有效半径(Effective Radius)增加:**
实验公式$I = mr^2 (\frac{g}{r\alpha} - 1)$中,旋转轴的半径$r$以平方的形式影响结果值。我们代入的$r = 0.0115\text{ m}$是绳子未缠绕时的轴半径。但实际上,由于轴上缠绕的绳子厚度($r_{string}$)和重叠现象,实际作用扭矩的有效半径为$r_{eff} = r + r_{string}/2$,微小地更大。因为代入了比实际更小的$r$值,推导出的转动惯量实验值比理论值小。
2. **刚体理想质量分布假设的局限性:**
理论值计算中使用的$0.5MR^2$等公式假定刚体的密度完全均匀的"理想连续体"。然而实际的实验用圆盘和圆环由于中央用于体结的槽或销钉、材料磨损等原因,质量分布并不完全均匀,这导致了与理论值的差异。
## 6.3 实验B:角动量守恒综合分析 (Conservation of Angular Momentum)
第三幅图展示了在外力被阻隔的状态下,旋转圆盘上放置圆环的完全非弹性碰撞实验前后角动量($L_1$、$L_2$)的变化。
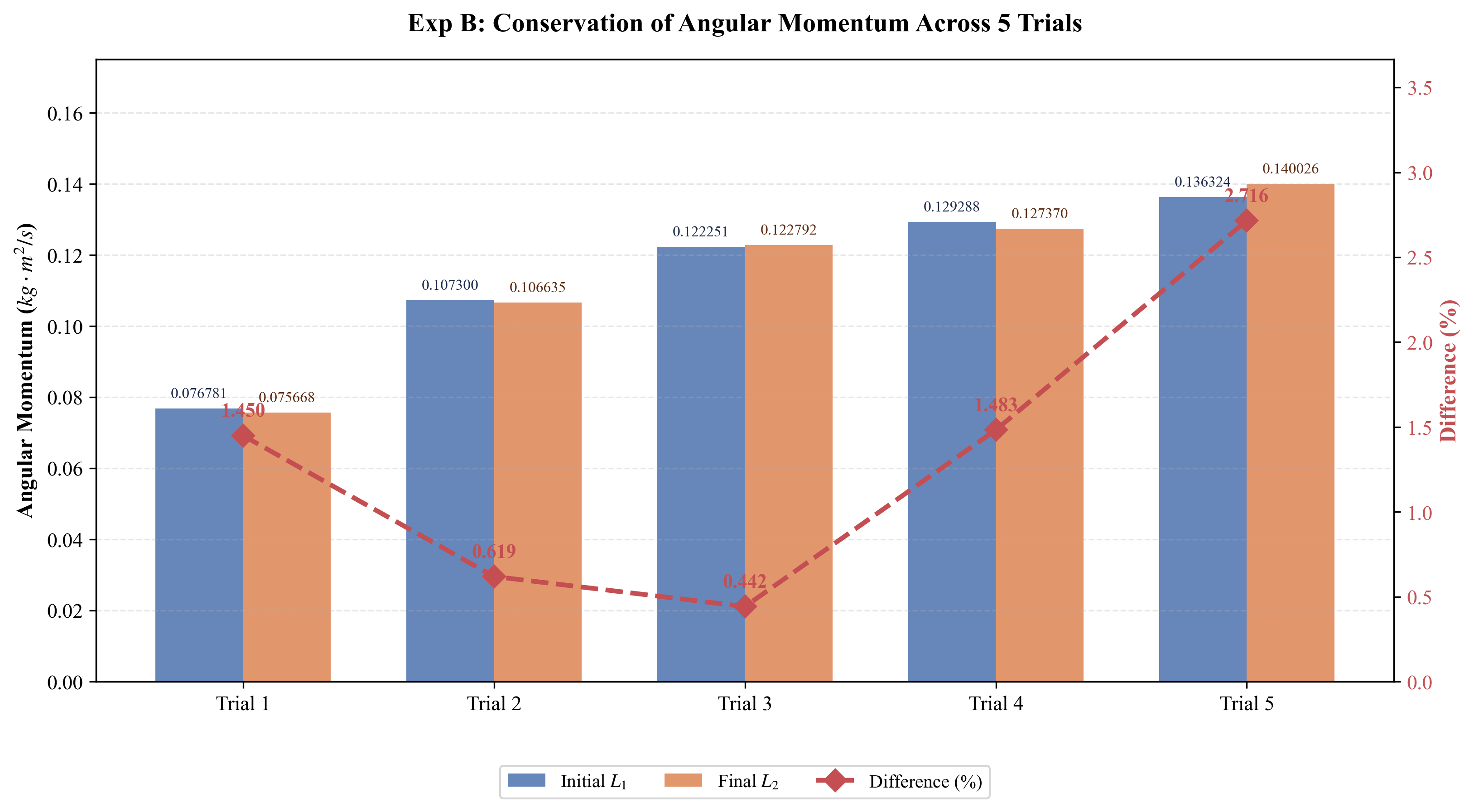
这个图表是本实验的亮点,从条形图可以看出5次Trial中初始角动量$L_1$和之后角动量$L_2$的高度几乎完美一致。以右侧轴为基准的误差率(Difference)折线在最小0.44%到最大2.71%之间记录,显现了**平均1.34%**的惊人精确度。
这表明尽管角速度从$\omega_1$急剧下降到$\omega_2$,但转动惯量的增加幅度($I_{disk} \to I_{total}$)精确地抵消了这一变化,使得$I_{disk}\omega_1 = I_{total}\omega_2$在数值上完美成立,从而以数据方式完全证实了这一点。
但微小的残余误差(约1.3%)产生的原因如下。
- **摩擦扭矩(Frictional Torque):** 圆环被放下到速度再次稳定化($\omega_2$)为止的短暂时间内,轴承摩擦和空气阻力对系统产生负(-)的合扭矩,微小地减少了角动量。
- **投放时中心轴偏差:** 当圆环被放下时如果不是完全置于正中央,而是偏离中心轴$d$,则根据平行轴定理($I = I_{cm} + Md^2$),之后的转动惯量会比预期更大,导致角速度变化中产生微小误差。
## 6.4 综合结论
通过本实验,我们成功验证了以下力学原理。
1. 通过实验式$I = mr^2 (\frac{g}{r\alpha} - 1)$定量确认了刚体的质量和几何分布(半径)是决定转动惯量的核心要素。(误差率在5~6%左右)
2. 在外部合扭矩为0的隔离系统中,系统内部质量分布变化(圆环投放)导致角速度变化时,系统的总角动量保持不变,这一点得到了平均误差率**1.34%**这一高度可信的证实。
3. 在实验数据初期分析过程中,发现了将旋转轴的"直径"误认为"半径"而代入的致命人为错误(初期误差率80%以上),并进行了修正。通过这一过程,体验了数据验证的重要性以及公式中变量(特别是平方项$r$)的敏感度。
## 6.5 Python源代码 (数据可视化算法)
本报告中数据分析使用的Python算法的核心可视化函数(生成双轴组合图表)如下。
import csv
import matplotlib.pyplot as plt
import numpy as np
import os
plt.rcParams['font.family'] = 'serif'
plt.rcParams['font.serif'] = ['Times New Roman', 'DejaVu Serif']
plt.rcParams['mathtext.fontset'] = 'stix'
plt.rcParams['axes.labelsize'] = 12
plt.rcParams['axes.titlesize'] = 14
plt.rcParams['xtick.labelsize'] = 11
plt.rcParams['ytick.labelsize'] = 11
plt.rcParams['legend.fontsize'] = 10
def plot_combo_chart(x_labels, bar1, label1, bar2, label2, line_data, line_label, title, y_left, y_right, filename):
"""
Helper function to generate a dual-axis combination chart.
Bars: 6 decimal places (smaller font).
Line: 3 decimal places (slightly larger, bolder font).
"""
fig, ax1 = plt.subplots(figsize=(11, 6.5))
x = np.arange(len(x_labels))
width = 0.35
rects1 = ax1.bar(x - width/2, bar1, width, label=label1, color='#4C72B0', alpha=0.85)
rects2 = ax1.bar(x + width/2, bar2, width, label=label2, color='#DD8452', alpha=0.85)
ax1.set_ylabel(y_left, fontweight='bold')
ax1.set_xticks(x)
ax1.set_xticklabels(x_labels)
ax1.bar_label(rects1, fmt='%.6f', padding=4, fontsize=8, color='#1b2a49')
ax1.bar_label(rects2, fmt='%.6f', padding=4, fontsize=8, color='#5c2a11')
max_bar_val = max(max(bar1), max(bar2))
if max_bar_val > 0:
ax1.set_ylim(0, max_bar_val * 1.25)
ax2 = ax1.twinx()
line = ax2.plot(x, line_data, color='#C44E52', marker='D', linestyle='--', linewidth=2.5, markersize=8, label=line_label)
ax2.set_ylabel(y_right, color='#C44E52', fontweight='bold')
ax2.tick_params(axis='y', labelcolor='#C44E52')
for i, val in enumerate(line_data):
if not np.isnan(val):
ax2.annotate(f'{val:.3f}',
(x[i], val),
textcoords="offset points",
xytext=(0, 10),
ha='center',
fontsize=10.5,
color='#C44E52',
fontweight='bold')
max_line_val = max([v for v in line_data if not np.isnan(v)] or [0])
if max_line_val > 0:
ax2.set_ylim(0, max_line_val * 1.35)
包含完整数据解析及预处理逻辑的完整源代码请参考附加的`main.py`。
# 7. 实验时注意事项
本实验涉及旋转力学系统的微小变化,因此为了最小化几何误差和摩擦,必须严格遵守以下事项进行实验。
## 7.1 旋转装置的水平保持 (Leveling)
调整旋转立架底座上安装的水平仪(Leveler)的螺钉,使水泡处于正中央,完全对齐装置的水平。若水平不对齐,原盘的旋转轴会倾斜,重力的分力会沿旋转方向作用,产生意外的额外合扭矩(Torque),导致角加速度测定中产生严重的系统误差。
## 7.2 绳子缠绕防止重叠及水平对齐 (String Winding & Alignment)
在旋转轴(3级滑轮)上缠绕绳子时,应保证绳子不重叠并整齐地单行缠绕。若绳子重叠缠绕,旋转轴的有效半径($r$)会随绳子厚度而变化。实验公式$I = mr^2 (\frac{g}{r\alpha} - 1)$中$r$以平方的形式比例相关,所以微小的半径变化也会导致转动惯量推导的大误差。另外,当绳子跨越智能滑轮(Smart Pulley)时,应调整滑轮高度,使绳子与地面形成完美的水平,以便张力完全作用为旋转轴的切线方向扭矩。
## 7.3 圆环投放时精确的中心一致 (Centering the Mass Ring)
在实验B(角动量守恒)中,将圆环投放到旋转圆盘上时,应使圆环精确地与圆盘的中心导槽对齐并落下。如果偏离中心$d$而落下,则根据平行轴定理($I = I_{cm} + Md^2$),圆环的转动惯量会异常增大,导致之后的角动量计算产生大误差。
## 7.4 最小化外部扭矩的干扰 (Minimizing External Torque)
投放圆环时要注意不要用手给予旋转方向的力(初始角速度),也不要垂直强力压下。只应通过重力作用轻轻放下(Drop),除碰撞时产生的摩擦外,不允许其他外部扭矩介入系统,才能观察到纯粹的角动量守恒。
## 7.5 砝码下落安全距离确保 (Safety of Hanging Mass)
进行实验A时,要注意下落的砝码不与地面或智能门装置碰撞。砝码与地面碰撞的瞬间张力($T$)会突然变为0或产生反弹,导致数据(角加速度线性区间)被破坏,因此应只采集到砝码即将接触地面前的数据,并用手或垫子安全地接住砝码。
# 8. 参考文献
[1] 庆熙大学, "E1-05 角动量守恒," APHY1002-11 物理学及实验1 实验资料 (PDF), n.d.
[2] 庆熙大学, "E1-05_角动量守恒," APHY1002-11 物理学及实验1 实验资料 (PDF), n.d.
[3] 庆熙大学, "EXP05_角动量守恒," APHY1002-11 物理学及实验1 实验数据表 (CSV), 2026.
[4] 庆熙大学, "物理学 实验-OT-李建彬," APHY1002-11 物理学及实验1 定向资料 (PDF), n.d.
[5] 毛骏健, 顾牡, 『大学物理学(第三版)(上册)』 (大学物理学第3版上册), 高等教育出版社 (高等教育出版社), 2020, ISBN: 9787040548822.
Comments NOTHING