
Posted on 2026-06-05
Excerpt
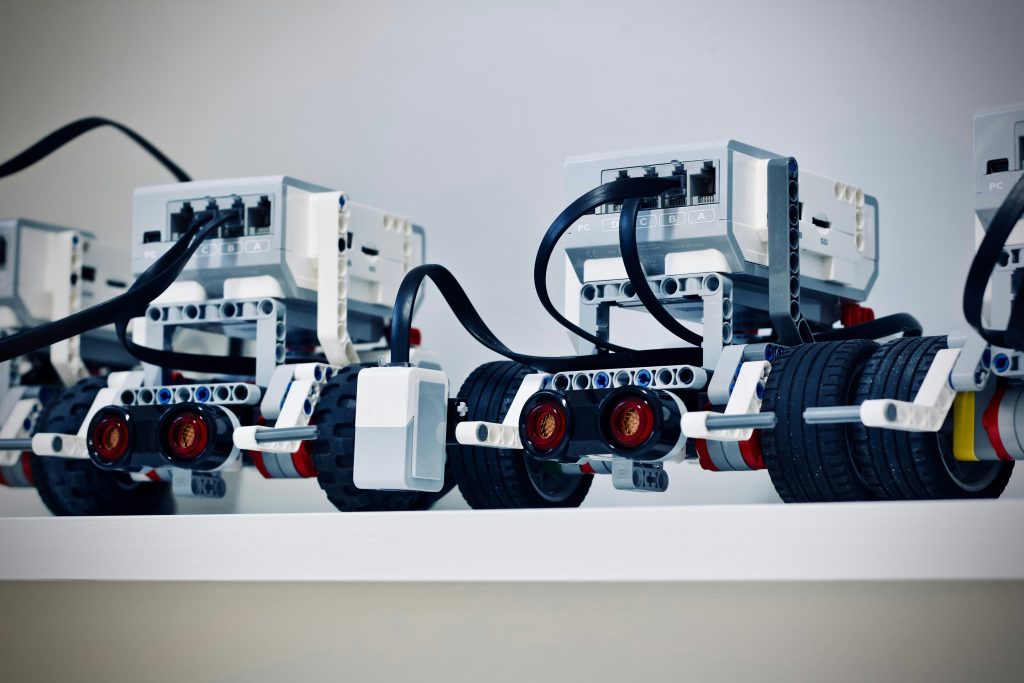
本プロジェクトでは、LEGO MINDSTORMS EV3プラットフォームをベースとしたインテリジェントなライントレーシング及びマテリアルハンドリングロボットを設計・実装した。複雑なコースにおける多分岐路の識別、動的ライントレーシング、特定マテリアルの把持要求に対応するため、本システムは低層運動制御に離散時間システムに基づく改良型比例-微分(PD)制御アルゴリズムを導入し、差動駆動運動学モデルと組み合わせることで、ロボットの滑らかで適応的な軌道追従を実現した。マクロ経路計画とタスク実行においては、ブール論理と有限状態機(FSM)に基づく決定性決定木モデルを構築し、「センサのブラインド化」、「交差点の誤判定」、「偽陽性終点」といった典型的な工学的課題を解決した。本稿では、本システムの制御理論の基礎、アルゴリズムの数学的導出、ソフトウェア・ハードウェア協調設計について詳述し、制御論の歴史及び関連する実証研究と併せて、直線、楕円、8の字の複雑軌道における異なるコントローラの性能比較を行う。同時に、組込みシステムの物理的特性(CPUスターべーション、PWM制御応答など)に対し、低層の計算資源最適化策を提案する$^{[1]}$。 


