
**Download Files:**
Moment of Inertia & Angular Momentum Conservation.pptx
Moment of Inertia & Angular Momentum Conservation.pdf
# 1.실험 제목
이번 실험의 주제는 **관성모멘트 측정과 각운동량 보존** 이다.
# 2. 실험 목적
회전하는 강체(Rigid Body)의 각가속도(Angular Acceleration)를 측정함으로써 그 물체의 **관성모멘트(Moment of Inertia)** 를 실험적으로 결정하고, 기하학적 구조를 바탕으로 계산된 이론값과 비교하여 회전 운동의 역학적 원리를 이해한다. 또한, 회전하는 계에 외부 토크가 작용하지 않을 때 **각운동량(Angular Momentum)** 이 보존됨을 실험적으로 확인하고, 이 과정에서 에너지의 변화를 고찰한다.
# 3. 관련 이론
## 3.1 관성모멘트 (Moment of Inertia)
회전 운동을 하는 물체에서 직선 운동의 '질량(Mass)'에 대응하는 물리량으로, 물체가 자신의 회전 상태를 유지하려는 성질의 크기를 나타낸다. 질량 $m_i$인 입자들이 회전축으로부터 $r_i$만큼 떨어져 있을 때, 관성모멘트 $I$는 다음과 같이 정의된다.
$$I = \sum m_i r_i^2$$
연속적인 질량 분포를 가진 강체의 경우, 미소 질량 $dm$에 대해 적분(Integral)하여 구한다.
$$I = \int r^2 dm$$
### 3.1.1 원판(Disk)과 원환(Ring)의 관성모멘트 유도 (증명)
#### 3.1.1.1 균일한 원판 (Solid Disk)
반지름이 $R$, 전체 질량이 $M$인 균일한 원판의 중심축에 대한 관성모멘트를 구해보자. 원판의 면밀도(Surface density) $\sigma = \frac{M}{\pi R^2}$이다.
반지름 $r$, 두께 $dr$인 미소 고리를 생각하면, 미소 면적 $dA = 2\pi r dr$이므로 미소 질량 $dm = \sigma dA = \frac{M}{\pi R^2} \cdot 2\pi r dr$이다.
$$I_{disk} = \int_0^R r^2 dm = \int_0^R r^2 \left( \frac{2Mr}{R^2} \right) dr = \frac{2M}{R^2} \int_0^R r^3 dr$$
$$I_{disk} = \frac{2M}{R^2} \left[ \frac{r^4}{4} \right]_0^R = \frac{2M}{R^2} \cdot \frac{R^4}{4} = \frac{1}{2}MR^2$$
#### 3.1.1.2 두꺼운 원환 (Thick Ring)
내경(Inner radius) $R_1$, 외경(Outer radius) $R_2$, 질량 $M$인 원환의 관성모멘트를 구해보자. 면밀도(Surface density) $\sigma = \frac{M}{\pi(R_2^2 - R_1^2)}$이다.
$$I_{ring} = \int_{R_1}^{R_2} r^2 \left( \frac{2Mr}{R_2^2 - R_1^2} \right) dr = \frac{2M}{R_2^2 - R_1^2} \left[ \frac{r^4}{4} \right]_{R_1}^{R_2}$$
$$I_{ring} = \frac{2M}{R_2^2 - R_1^2} \cdot \frac{R_2^4 - R_1^4}{4} = \frac{M}{2(R_2^2 - R_1^2)}(R_2^2 - R_1^2)(R_2^2 + R_1^2)$$
$$I_{ring} = \frac{1}{2}M(R_1^2 + R_2^2)$$
## 3.2 각운동량과 토크의 관계 유도 (Newton 제2법칙의 회전 변환)
회전 운동을 역학적으로 해석하기 위해, 병진 운동의 기본 법칙인 뉴턴의 제2법칙($F = ma$)을 회전 운동의 형태로 변환해 보자.
질량이 $m$인 단일 입자를 가정할 때, 뉴턴의 제2법칙의 미분 형태는 선운동량($p = mv$)의 시간 변화율로 다음과 같이 정의된다.
$$F = \frac{dp}{dt} = m\frac{dv}{dt}$$
이 입자가 원점으로부터 위치 벡터 $r$에 있을 때, 입자에 작용하는 토크(Torque, $\tau$)는 위치 벡터와 힘 벡터의 외적(Cross Product, Outer Product)으로 정의된다.
$$\tau = r \times F$$
위 식의 $F$ 자리에 뉴턴 제2법칙의 미분 형태를 대입하면 다음과 같다.
$$\tau = r \times \frac{dp}{dt} \tag{1}$$
한편, 입자의 각운동량(Angular Momentum, $L$)은 위치 벡터와 선운동량(Linear Momentum)의 외적으로 정의된다.
$$L = r \times p$$
이 각운동량을 시간 $t$에 대해 미분해 보자. 미분의 곱의 법칙에 의해 다음과 같이 전개된다.
$$\frac{dL}{dt} = \frac{d}{dt}(r \times p) = \left( \frac{dr}{dt} \times p \right) + \left( r \times \frac{dp}{dt} \right)$$
여기서 $\frac{dr}{dt}$는 입자의 속도 $v$이며, 선운동량 $p = mv$이다. 속도 벡터 $v$와 자신과 평행한 $mv$의 외적은 0이 된다 ($v \times mv = 0$). 따라서 첫 번째 항은 소거되고 두 번째 항만 남는다.
$$\frac{dL}{dt} = r \times \frac{dp}{dt} \tag{2}$$
식 (1)과 식 (2)를 비교하면, 토크와 각운동량 사이의 근본적인 관계가 도출된다. 즉, 계에 작용하는 알짜 토크는 각운동량의 시간 변화율과 같다.
$$\tau = \frac{dL}{dt} \tag{3}$$
이제 이 관계를 고정된 축을 중심으로 회전하는 강체로 확장해 보자. 강체가 각속도 $\omega$로 회전할 때, 각 입자의 속도는 $v = r\omega$ (스칼라 형태)이므로 각운동량 $L$은 다음과 같이 표현된다.
$$L = r \cdot p = r(mv) = mr^2\omega$$
여기서 $mr^2$은 입자의 관성모멘트 $I$이므로, $L = I\omega$가 성립한다. 이를 식 (3)에 대입하여 시간에 대해 미분하면,
$$\tau = \frac{d}{dt}(I\omega) = I\frac{d\omega}{dt} = I\alpha \tag{4}$$
최종적으로, 병진 운동의 $F = m\frac{dv}{dt}$에 완벽하게 대응하는 회전 운동의 운동 방정식이 유도된다.
$$\tau = r \times F = I\alpha = \frac{dL}{dt}$$
이 방정식은 본 실험에서 원판과 링의 회전 가속도($\alpha$)를 측정하여 관성모멘트($I$)를 역산하는 핵심적인 수학적 근거가 된다.
## 3.3 회전 운동 에너지 (Rotational Kinetic Energy) 및 유도
병진 운동(Translational motion)을 하는 물체의 운동 에너지가 질량과 속도에 의해 결정되듯이, 고정된 축을 중심으로 회전하는 강체의 운동 에너지 역시 관성모멘트와 각속도를 통해 정의할 수 있다. 이를 회전 운동 에너지(Rotational Kinetic Energy)라고 하며, 병진 운동 에너지의 기본 정의를 회전하는 강체의 각 미소 질량에 적용하여 유도할 수 있다.
### 3.3.1 유도 과정
어떤 강체가 고정된 회전축을 중심으로 각속도 $\omega$로 회전하고 있다고 가정하자. 이 강체는 수많은 미소 입자들로 이루어져 있다고 볼 수 있다.
회전축으로부터 수직 거리 $r_i$만큼 떨어져 있는 질량 $m_i$인 $i$번째 입자의 선속도 $v_i$는 다음과 같이 각속도 $\omega$와 관계를 가진다.
$$v_i = r_i \omega$$
이 $i$번째 입자가 가지는 병진 운동 에너지 $K_i$는 뉴턴 역학의 기본 정의에 따라 다음과 같다.
$$K_i = \frac{1}{2}m_i v_i^2$$
여기에 $v_i = r_i \omega$를 대입하여 정리하면,
$$K_i = \frac{1}{2}m_i (r_i \omega)^2 = \frac{1}{2} m_i r_i^2 \omega^2$$
이 된다.
강체 전체의 회전 운동 에너지 $K_{rot}$는 강체를 구성하는 모든 입자들의 운동 에너지를 합한 것과 같다. 강체가 완전한 형태를 유지하는 강체(Rigid body)라면, 회전 시 모든 입자는 동일한 각속도 $\omega$를 공유하므로 $\omega$는 시그마($\sum$) 기호 밖으로 묶어낼 수 있다.
$$K_{rot} = \sum_{i} K_i = \sum_{i} \left( \frac{1}{2} m_i r_i^2 \omega^2 \right)$$
$$K_{rot} = \frac{1}{2} \left( \sum_{i} m_i r_i^2 \right) \omega^2$$
이때 괄호 안의 식 $\sum_{i} m_i r_i^2$은 앞서 3.1절에서 정의한 관성모멘트(Moment of Inertia, $I$)와 동일하다.
따라서 괄호 부분을 $I$로 치환하면 최종적인 회전 운동 에너지 공식이 완성된다.
$$K_{rot} = \frac{1}{2}I\omega^2$$
이 결과는 병진 운동 에너지 공식 $K = \frac{1}{2}mv^2$과 완벽한 수학적 대칭을 이룬다. 즉, 회전 운동에서는 질량 $m$ 대신 관성모멘트 $I$가, 선속도 $v$ 대신 각속도 $\omega$가 그 역할을 대신함을 명확히 보여준다.
### 3.3.2 본 실험에서의 물리적 의미
본 실험의 '실험 B(각운동량 보존)'에서 회전하는 원판 위에 원환(Mass Ring)을 떨어뜨리는 과정은, 외부 토크가 없으므로 각운동량($L$)은 보존되지만 내부적인 마찰에 의해 두 물체가 결국 같은 각속도로 회전하게 되는 완전 비탄성 충돌(Perfectly inelastic collision)과 역학적으로 동일하다. 따라서 이 공식을 이용하면 충돌 전후의 회전 운동 에너지를 계산하여, 각운동량이 보존됨에도 불구하고 운동 에너지는 열에너지 등으로 손실($\Delta K_{rot} < 0$)됨을 추가적으로 증명할 수 있다.
## 3.4 각운동량 보존 법칙 (Conservation of Angular Momentum)
계에 작용하는 외력에 의한 알짜 토크가 0인 경우($\tau_{ext} = 0$), 계의 총 각운동량은 일정하게 유지된다.
$$\frac{dL}{dt} = 0 \implies L = I_i \omega_i = I_f \omega_f = \text{Constant}$$
본 실험에서는 회전하는 원판 위에 원환을 떨어뜨려 관성모멘트를 $I_i \to I_f$로 변화시켰을 때, 각속도가 $\omega_i \to \omega_f$로 변하는 과정을 통해 이를 확인한다.
## 3.5 실험적 관성모멘트 측정 원리 및 공식 유도
본 실험에서는 회전축(반지름 $r$)에 실을 감고 그 끝에 질량 $m$인 추를 매달아 자유 낙하시키는 방식을 사용한다. 추가 중력에 의해 가속하며 낙하할 때 실을 당기게 되고, 이 장력(Tension, $T$)이 회전축에 토크를 발생시켜 전체 계의 회전 운동을 유발한다. 이 역학적 과정을 수식으로 분해하면 다음과 같다.
### 3.5.1 추의 병진 운동 방정식 (Translational Equation of Motion)
낙하하는 질량 $m$인 추에 작용하는 알짜힘은 아래 방향으로 작용하는 중력 $mg$와 위 방향으로 작용하는 실의 장력 $T$이다. 추의 낙하 방향을 양(+)으로 설정하면, 뉴턴 제2법칙에 따른 선가속도 $a$의 운동 방정식은 다음과 같다.
$$mg - T = ma \tag{1}$$
### 3.5.2 강체의 회전 운동 방정식 (Rotational Equation of Motion)
실이 회전축을 당기는 장력 $T$는 반지름이 $r$인 회전축의 접선 방향으로 작용하므로 알짜 토크 $\tau$를 형성한다. 회전체의 총 관성모멘트를 $I$, 각가속도를 $\alpha$라고 할 때 토크 방정식은 다음과 같다. (장력의 작용선과 반지름 벡터는 서로 수직이므로 $\sin 90^\circ = 1$이 된다.)
$$\tau = r \times T = rT = I\alpha \tag{2}$$
### 3.5.3 선가속도와 각가속도의 구속 조건 (Kinematic Constraint)
실이 늘어나거나 회전축에서 미끄러지지 않는 이상적인 상태를 가정하면, 추의 선가속도 $a$와 회전축 표면의 접선 가속도는 완전히 동일하다. 따라서 선운동과 회전운동 사이에는 다음의 기하학적 관계가 성립한다.
$$a = r\alpha \tag{3}$$
### 3.5.4 공식 유도 전개 과정
위의 세 가지 수식을 연립하여 우리가 실험적으로 구하고자 하는 관성모멘트 $I$에 대한 식을 도출할 수 있다.
먼저, 식 (3)의 구속 조건 $a = r\alpha$를 식 (1)에 대입한 후, 장력 $T$에 대하여 식을 정리한다.
$$mg - T = m(r\alpha)$$
$$T = m(g - r\alpha) \tag{4}$$
도출된 장력 $T$를 식 (2)의 회전 운동 방정식에 대입한다.
$$r \cdot \left[ m(g - r\alpha) \right] = I\alpha$$
좌변의 괄호를 풀어서 전개하면 다음과 같다.
$$mgr - mr^2\alpha = I\alpha$$
우리의 최종 목표인 관성모멘트 $I$에 대하여 식을 정리하기 위해 양변을 각가속도 $\alpha$로 나눈다.
$$I = \frac{mgr - mr^2\alpha}{\alpha} = \frac{mgr}{\alpha} - mr^2$$
마지막으로 공통항인 $mr^2$으로 우변을 묶어내면 최종적인 관성모멘트 실험식이 완성된다.
$$I = mr^2 \left( \frac{g}{r\alpha} - 1 \right)$$
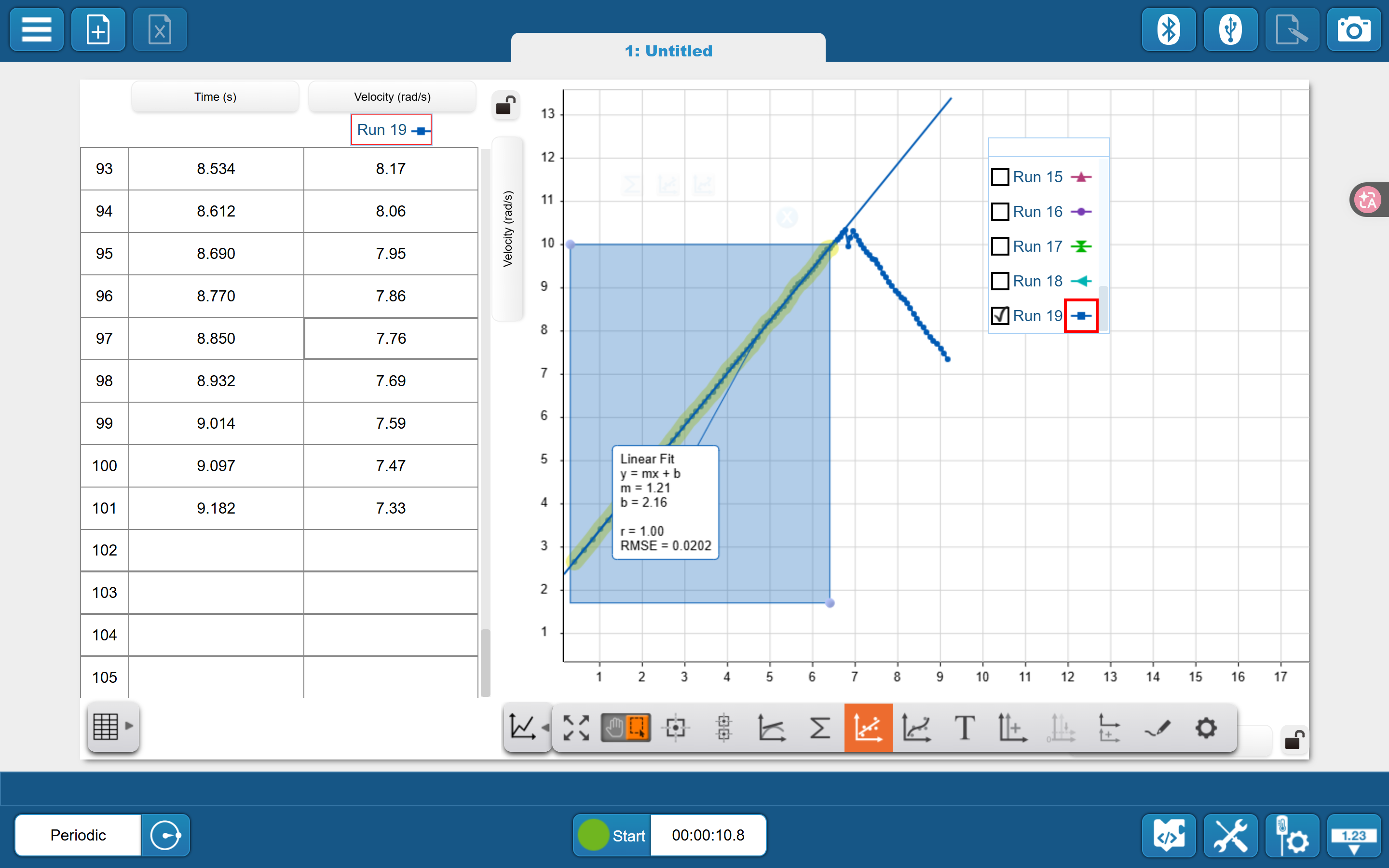
이 유도된 최종 공식을 통해, 우리는 실험실에서 직접 측정한 기하학적 상수(추의 질량 $m$, 회전축의 반지름 $r$)와 중력가속도 $g$, 그리고 SPARKvue 데이터 수집 소프트웨어를 통해 선형 회귀(Linear Fit)로 얻어낸 **각가속도(Angular Acceleration)** $\alpha$ 값만을 대입함으로써 복잡한 형태의 강체 관성모멘트 $I$를 정량적으로 결정할 수 있다.
# 4. 실험 방법
본 실험은 크게 두 부분으로 나뉘어 진행된다. **실험 A**에서는 낙하하는 추를 이용하여 원판과 원환의 관성모멘트를 측정하고, **실험 B**에서는 회전하는 원판 위에 원환을 떨어뜨려 각운동량이 보존되는지 확인한다.
## 4.1 실험 A 관성모멘트 측정(Measurement of Moment of Inertia)
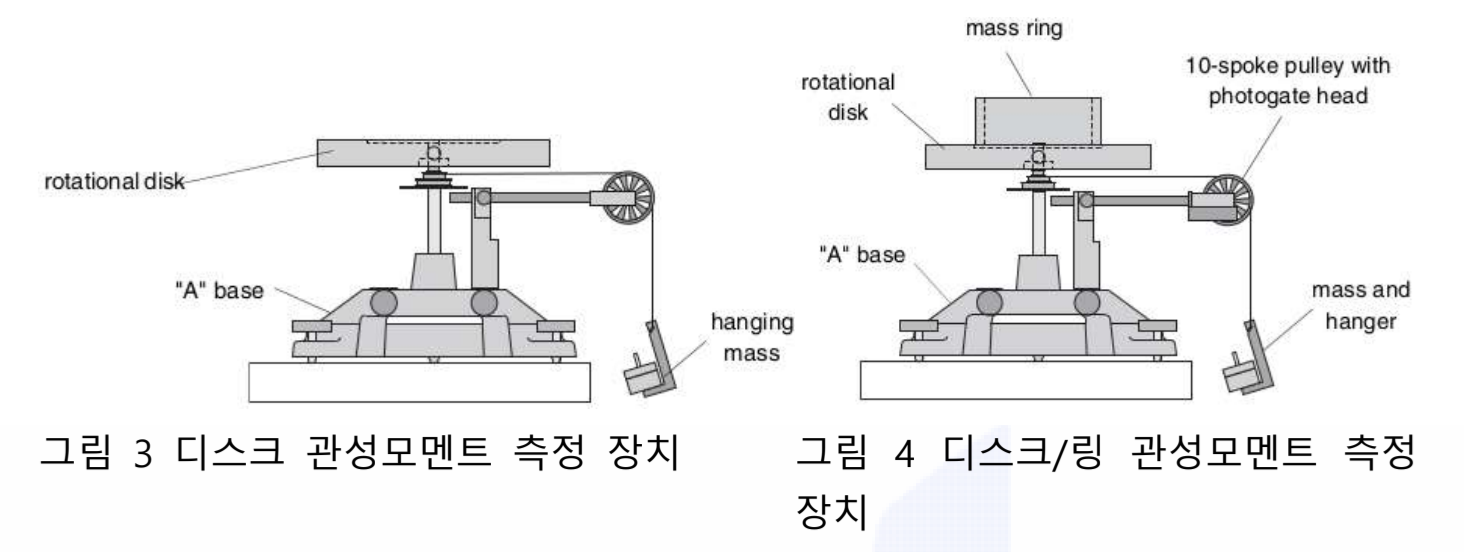
1. **회전 장치 설치**: [그림 3]과 같이 회전 스탠드를 설치하고 원판(Rotational Disk)을 회전축에 연결한다. 수평자(Leveler)를 사용하여 회전 스탠드와 원판의 수평을 정확하게 맞춘다.
2. **스마트게이트 설정**: 스마트게이트(Smart Gate)를 회전 스탠드에 고정한다. 이때 스마트게이트의 센서가 회전축에 연결된滑轮(Pulley)의 홈(Spoke)을 정확히 감지할 수 있도록 위치를 조정한다.
3. **기초 데이터 측정**: 추와 추걸이의 전체 질량 $m$을 전자저울로 측정하고, 실이 감길 회전축의 반지름 $r$을 유보라카리파(Vernier Calipers)를 사용하여 정밀하게 측정한다.
4. **소프트웨어 준비**: SPARKvue 앱을 실행하고 **[Smart Gate Only]** -> [Smart Pulley (Rotational)]을 선택한다. **Spoke Angle**은 $36^\circ$ (또는 장치에 맞는 값)로 설정하고, 측정 물리량으로 **Velocity** 와 **Acceleration**을 선택한다.
5. **원판 각가속도 측정**: 회전축에 실을 감고 추를 낙하시키는 동안 각속도를 측정한다. 데이터 그래프에서 각가속도($\alpha$)가 일정한 구간을 선택하여 선형 회귀(Linear Fit)를 수행하고 그 기울기 값을 기록한다.
6. **반복 측정**: 과정 5를 총 5회 반복하여 원판의 평균 각가속도를 구하고, 이를 통해 $I_{disk}$를 계산한다.
7. **원환(Mass Ring) 추가**: 원판 위에 원환을 올리고 과정 5~6을 반복한다. 이때 측정된 값은 원판과 원환의 합성 관성모멘트($I_{total}$)이며, 여기서 앞서 구한 $I_{disk}$를 빼서 $I_{ring}$의 실험값을 도출한다.
## 4.2 실험 B 각운동량 보존(Conservation of Angular Momentum)
1. **장치 재정렬**: 실험 A에서 사용했던 실과 추를 제거한다. 계는 외부 토크가 없는 자유 회전 상태여야 한다.
2. **초기 회전 및 측정 시작**: 원판을 손으로 가볍게 돌려 회전시킨 후, SPARKvue의 측정(Start) 버튼을 누른다.
3. **초기 각속도($\omega_1$) 측정**: 원판이 안정적으로 회전할 때, 원환을 떨어뜨리기 직전의 각속도 $\omega_1$을 기록한다.
4. **원환 투하**: 원판의 회전축에 맞춰 원환을 조심스럽게 떨어뜨린다. 이때 원환이 원판의 중심에 정확히 안착하도록 주의한다.
5. **나중 각속도($\omega_2$) 측정**: 원환이 안착한 후, 원판과 원환이 함께 회전하며 안정된 상태의 각속도 $\omega_2$를 기록한다.
6. **데이터 분석**: 측정된 $\omega_1, \omega_2$와 실험 A에서 얻은 $I_{disk}, I_{total}$을 사용하여 충돌 전후의 각운동량 $L_1, L_2$를 계산하고 보존 여부를 확인한다.
7. **반복 측정**: 과정 2~6을 총 5회 반복하여 데이터의 신뢰성을 확보한다.
# 5. 실험 결과
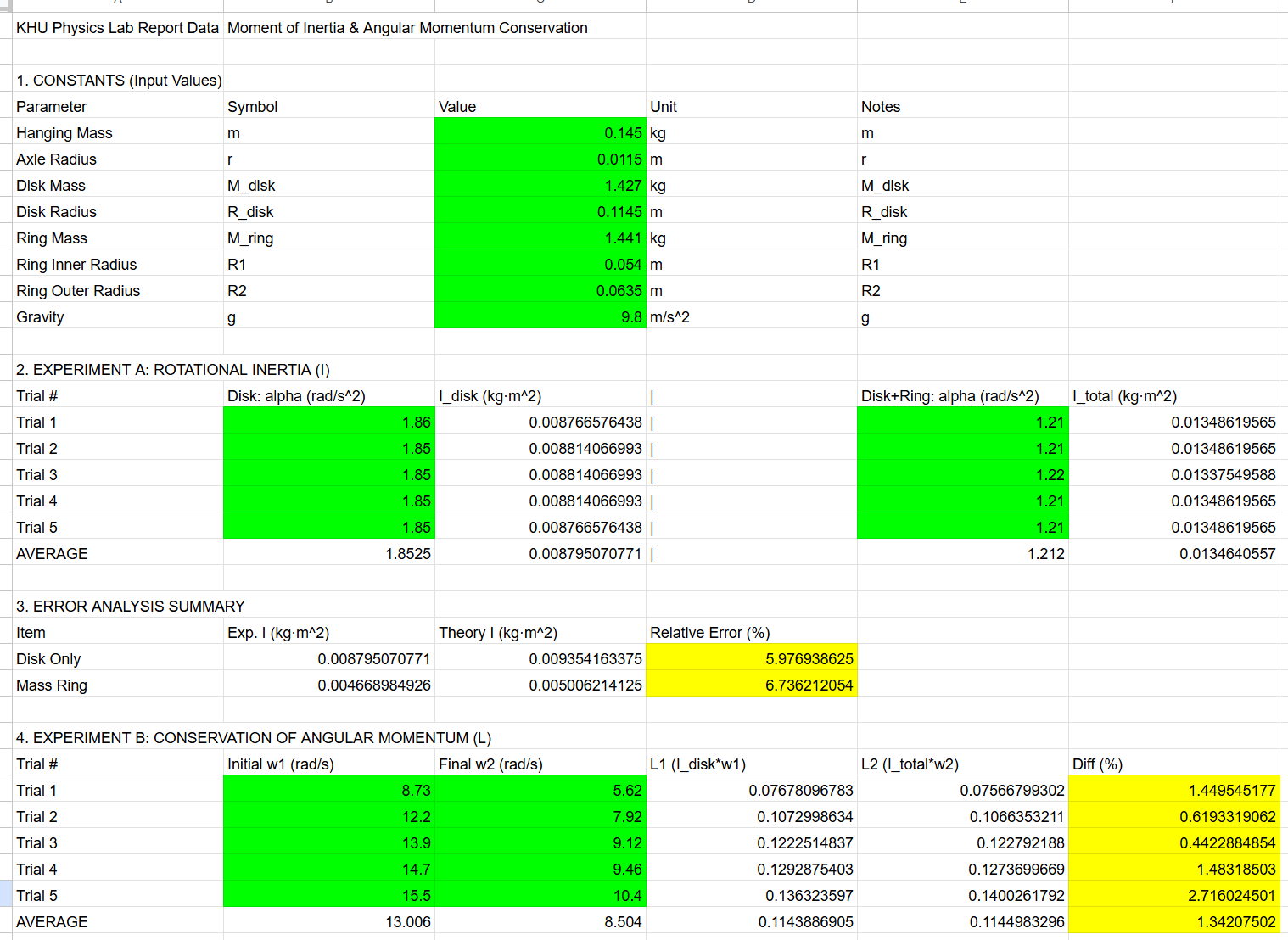
## 5.1 실험 기본 제원 (Constants)
실험 A와 B의 계산에 공통으로 사용된 기하학적 상수 및 질량 측정값은 다음과 같다.
| 매개변수 (Parameter) | 기호 (Symbol) | 측정값 (Value) | 단위 (Unit) |
|---|---|---|---|
| 추의 질량 (Hanging Mass) | $m$ | 0.145 | $\text{kg}$ |
| 회전축 반지름 (Axle Radius) | $r$ | 0.0115 | $\text{m}$ |
| 원판 질량 (Disk Mass) | $M_{disk}$ | 1.427 | $\text{kg}$ |
| 원판 반지름 (Disk Radius) | $R_{disk}$ | 0.1145 | $\text{m}$ |
| 원환 질량 (Ring Mass) | $M_{ring}$ | 1.441 | $\text{kg}$ |
| 원환 내경 (Ring Inner Radius) | $R_1$ | 0.054 | $\text{m}$ |
| 원환 외경 (Ring Outer Radius) | $R_2$ | 0.0635 | $\text{m}$ |
| 중력가속도 (Gravity) | $g$ | 9.8 | $\text{m/s}^2$ |
## 5.2 실험 A 관성모멘트 측정 (Rotational Inertia)
### 5.2.1 측정 데이터 및 실험값 계산
원판 단독 회전과 원판+원환 겹침 회전에 대하여 각각 5회씩 추를 낙하시켜 각가속도($\alpha$)를 측정하였다. 실험적 관성모멘트는 식 $I = mr^2 (\frac{g}{r\alpha} - 1)$을 이용하여 도출하였다. 원환 단독의 관성모멘트 실험값은 전체 관성모멘트에서 원판의 관성모멘트를 빼서($I_{ring} = I_{total} - I_{disk}$) 계산하였다.
| 측정 횟수 $(Trial)$ | 원판 $α (rad/s^2)$ | 원판 $I_{disk} (kg \cdot m^2)$ | 원판+원환 $α (rad/s^2)$ | 총 관성모멘트 $I_{total} (kg \cdot m^2)$ |
|---|---|---|---|---|
| Trial 1 | 1.860 | 0.008767 | 1.210 | 0.013486 |
| Trial 2 | 1.850 | 0.008814 | 1.210 | 0.013486 |
| Trial 3 | 1.850 | 0.008814 | 1.220 | 0.013375 |
| Trial 4 | 1.850 | 0.008814 | 1.210 | 0.013486 |
| Trial 5 | 1.850 | 0.008767 | 1.210 | 0.013486 |
| 평균 (AVERAGE) | 1.8525 | 0.008795 | 1.2120 | 0.013464 |
### 5.2.2 오차 분석 (Error Analysis Summary)
원판과 원환의 이론적 관성모멘트는 각각 $I_{disk} = \frac{1}{2}MR^2$, $I_{ring} = \frac{1}{2}M(R_1^2 + R_2^2)$ 공식을 사용하여 계산하였으며, 이를 실험 평균값과 비교하였다.
| 항목 $(Item)$ | 실험값 $I_{exp} (kg \cdot m^2)$ | 이론값 $I_{theo} (kg \cdot m^2)$ | 상대 오차율 $(\%)$ |
|---|---|---|---|
| 원판 (Disk Only) | 0.008795 | 0.009354 | 5.977 |
| 원환 (Mass Ring) | 0.004669 | 0.005006 | 6.736 |
_※ 원환의 실험값 $I_{ring}$은 (총 관성모멘트 평균 0.013464) - (원판 관성모멘트 평균 0.008795) = 0.004669 로 계산됨._
## 5.3 실험 B 각운동량 보존 (Conservation of Angular Momentum)
회전하는 원판 위에 원환을 낙하시키는 완전 비탄성 충돌 실험을 5회 반복하였다. 충돌 전의 초기 각운동량 $L_1 = I_{disk} \cdot \omega_1$과 충돌 후의 나중 각운동량 $L_2 = I_{total} \cdot \omega_2$를 계산하여 두 값의 차이를 확인하였다.
_(주의: 각운동량 계산 시 사용된 관성모멘트 $I$는 실험 A에서 구한 실험 평균값을 적용하였다.)_
| 측정 횟수 $(Trial)$ | 초기 $ω_1 (rad/s)$ | 나중 $ω_2 (rad/s)$ | 초기 $L_1 (kg \cdot m^2/s)$ | 나중 $L_2 (kg⋅m2/s)$ | 오차율 $(\%)$ |
|---|---|---|---|---|---|
| Trial 1 | 8.730 | 5.620 | 0.076781 | 0.075668 | 1.450 |
| Trial 2 | 12.200 | 7.920 | 0.107300 | 0.106635 | 0.619 |
| Trial 3 | 13.900 | 9.120 | 0.122251 | 0.122792 | 0.442 |
| Trial 4 | 14.700 | 9.460 | 0.129288 | 0.127370 | 1.483 |
| Trial 5 | 15.500 | 10.400 | 0.136324 | 0.140026 | 2.716 |
| 평균 (AVERAGE) | 13.006 | 8.504 | 0.114389 | 0.114498 | 1.342 |
_※ 오차율 계산식: $\delta = \frac{\|L_1 - L_2\|}{L_1} \times 100 \%$_
# 6.분석 및 토의
본 분석에서는 실험 A(관성모멘트 측정)와 실험 B(각운동량 보존)의 측정값 및 이론값을 정량적이고 시각적으로 비교하기 위해 Python 기반의 데이터 분석 및 시각화 알고리즘을 활용하였다. 이를 통해 절대적인 물리량의 비교(막대그래프)와 상대 오차의 변동 추이(꺾은선 그래프)를 이중 축(Dual-axis) 콤보 차트로 구현하여 데이터의 신뢰성과 계통 오차를 직관적으로 분석하였다.
관성모멘트 실험값 $I_{exp}$와 이론값 $I_{theo}$ 사이의 상대 오차율 $\delta_I$, 그리고 충돌 전후의 각운동량 오차율 $\delta_L$은 다음과 같이 정의하여 분석에 적용하였다.
$$\delta_I(\%) = \frac{|I_{exp} - I_{theo}|}{I_{theo}} \times 100\%, \qquad \delta_L(\%) = \frac{|L_1 - L_2|}{L_1} \times 100\%$$
## 6.1 실험 A: 원판의 관성모멘트 정밀 비교 (Disk Only)
첫 번째 그래프는 5회에 걸친 원판(Disk) 단독 회전 실험에서 측정된 관성모멘트 실험값과 기하학적 제원에 기반한 이론값을 비교한 것이다.
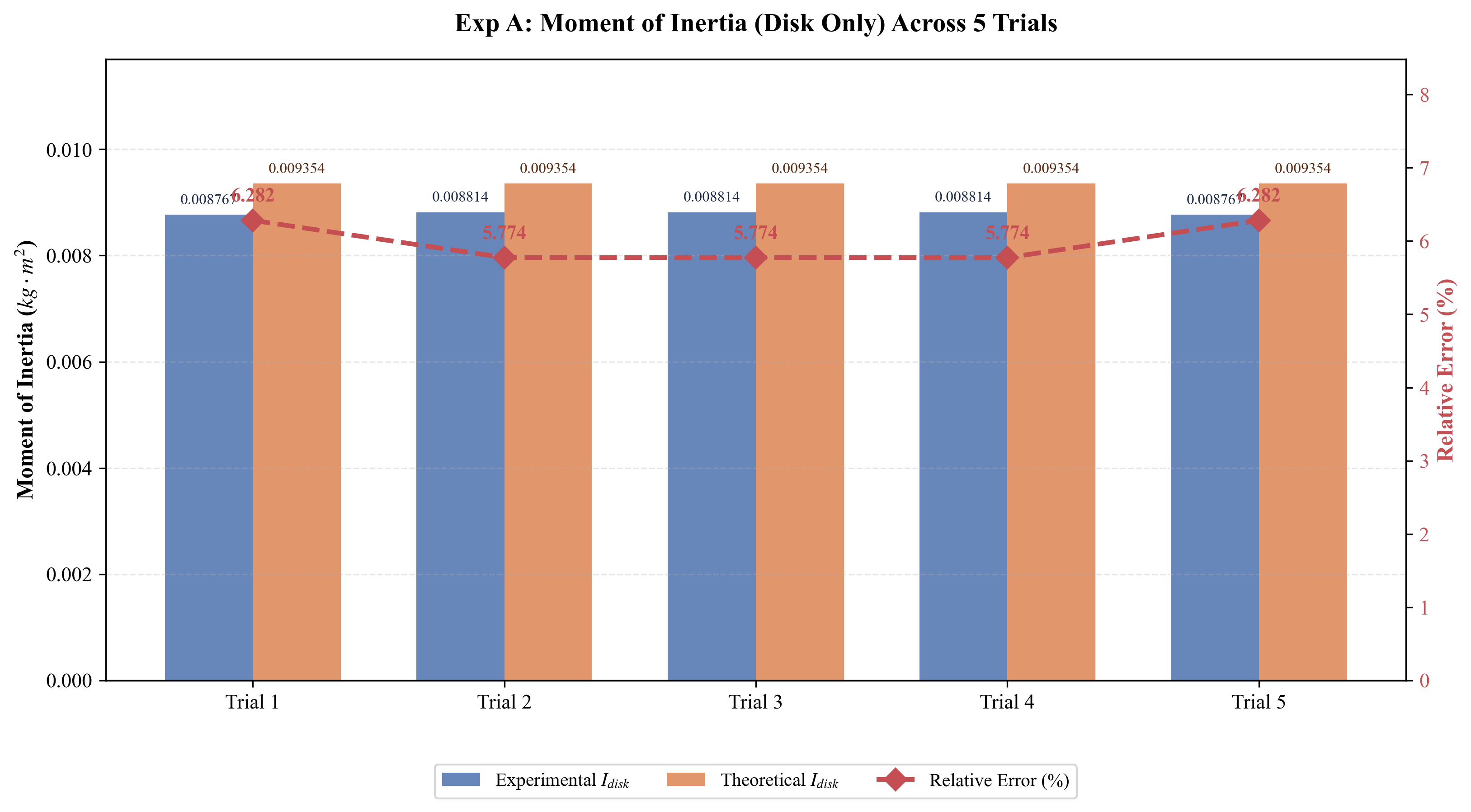
그래프를 분석하면, 5번의 Trial 내내 측정된 실험값(파란색 막대)이 이론값(주황색 막대)보다 미세하게 낮게 형성되어 있음을 알 수 있다. 그 결과 빨간색 점선으로 표시된 상대 오차율은 약 **5.97%** 부근에서 매우 일관되게 유지되고 있다.
데이터의 산포도(변동성)가 극히 낮다는 것은 실험자의 낙하 조작이나 SPARKvue를 통한 각가속도($\alpha$) 측정, 그리고 선형 회귀(Linear fit) 과정이 매우 정밀하게 수행되었음을 의미한다. 즉, 이 약 6%의 오차는 무작위 오차(Random Error)가 아닌 실험 장비 자체의 구조적 요인에 의한 **계통 오차(Systematic Error)** 로 해석해야 타당하다.
## 6.2 실험 A: 원환의 관성모멘트 정밀 비교 (Mass Ring)
두 번째 그래프는 원판과 원환이 결합된 상태에서 측정한 총 관성모멘트($I_{total}$)에서 원판의 관성모멘트($I_{disk}$)를 차감하여 도출한 원환(Ring) 단독의 실험값과 이론값을 비교한 결과이다.
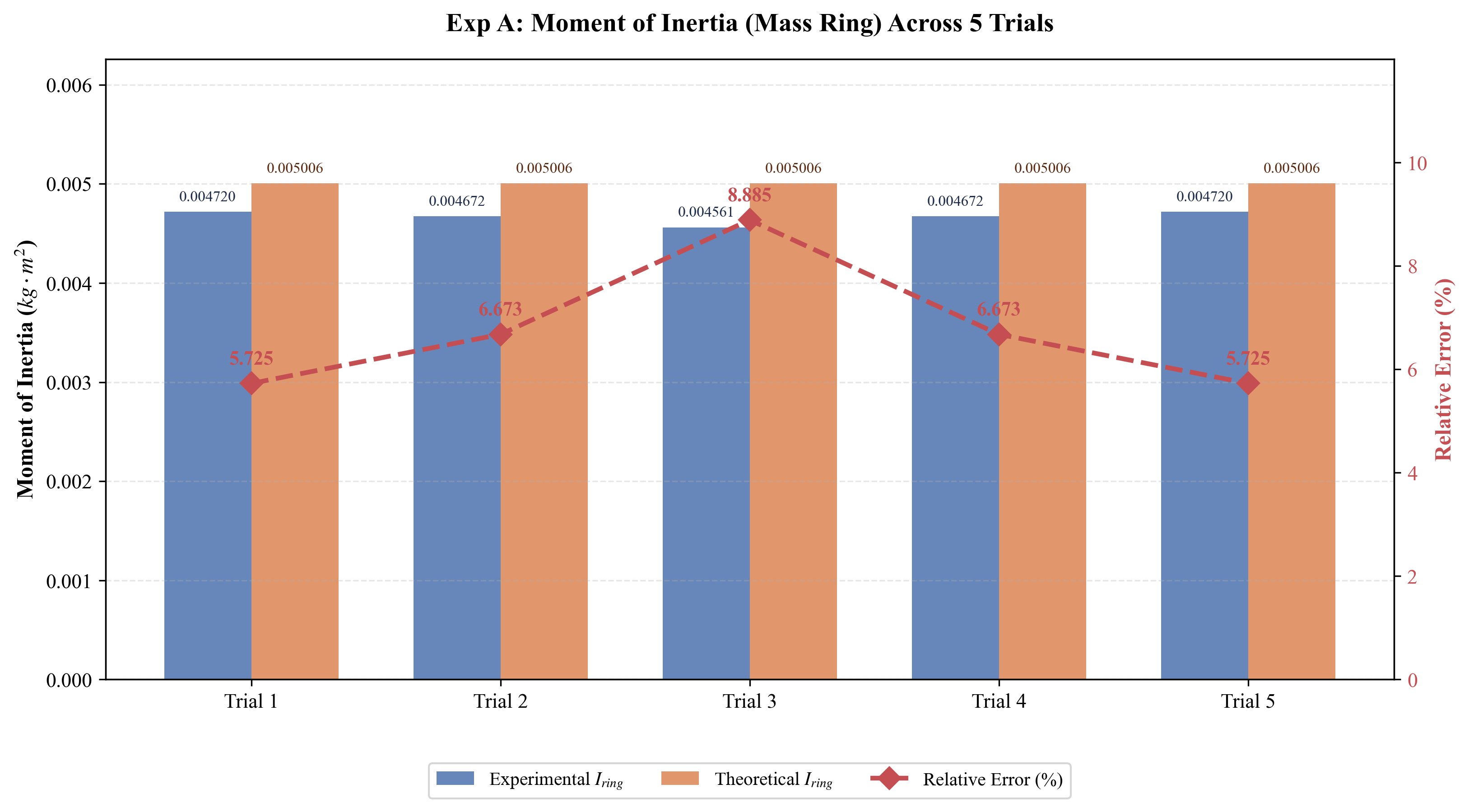
원환의 관성모멘트 오차율 역시 약 **6.73%** 로 원판 실험과 유사한 경향성과 안정적인 오차 범위를 보여준다. 실험 A 전체에 걸쳐 실험값이 이론값보다 약 6% 작게 산출($I_{exp} < I_{theo}$)된 원인은 다음 두 가지로 심층 분석할 수 있다.
1. **실의 두께에 따른 유효 반지름(Effective Radius) 증가:**
실험 공식 $I = mr^2 (\frac{g}{r\alpha} - 1)$에서 회전축의 반지름 $r$은 제곱으로 비례하여 결과값에 영향을 미친다. 우리가 대입한 $r = 0.0115,\text{m}$는 실이 감기지 않은 맨 축의 반지름이다. 하지만 실제로는 축에 감긴 실의 두께($r_{string}$)와 겹침 현상으로 인해, 토크가 작용하는 실제 유효 반지름은 $r_{eff} = r + r_{string}/2$ 로 미세하게 더 크다. 공식에 실제보다 작은 $r$ 값을 대입했기 때문에, 산출된 관성모멘트 실험값이 이론값보다 작게 도출된 것이다.
2. **강체의 이상적 질량 분포 가정의 한계:**
이론값 계산에 사용된 $0.5MR^2$ 등의 공식은 강체의 밀도가 완벽하게 균일한 '이상적인 연속체'임을 가정한다. 그러나 실제 실험용 원판과 원환은 체결을 위한 중앙의 홈이나 핀, 재질의 마모 등으로 인해 질량 분포가 완벽히 균일하지 않으며, 이것이 이론값과의 차이를 발생시킨다.
## 6.3 실험 B: 각운동량 보존 종합 분석 (Conservation of Angular Momentum)
세 번째 그래프는 외력이 차단된 상태에서 회전하는 원판에 원환을 떨어뜨리는 완전 비탄성 충돌 실험의 전후 각운동량($L_1$, $L_2$) 변화를 나타낸다.
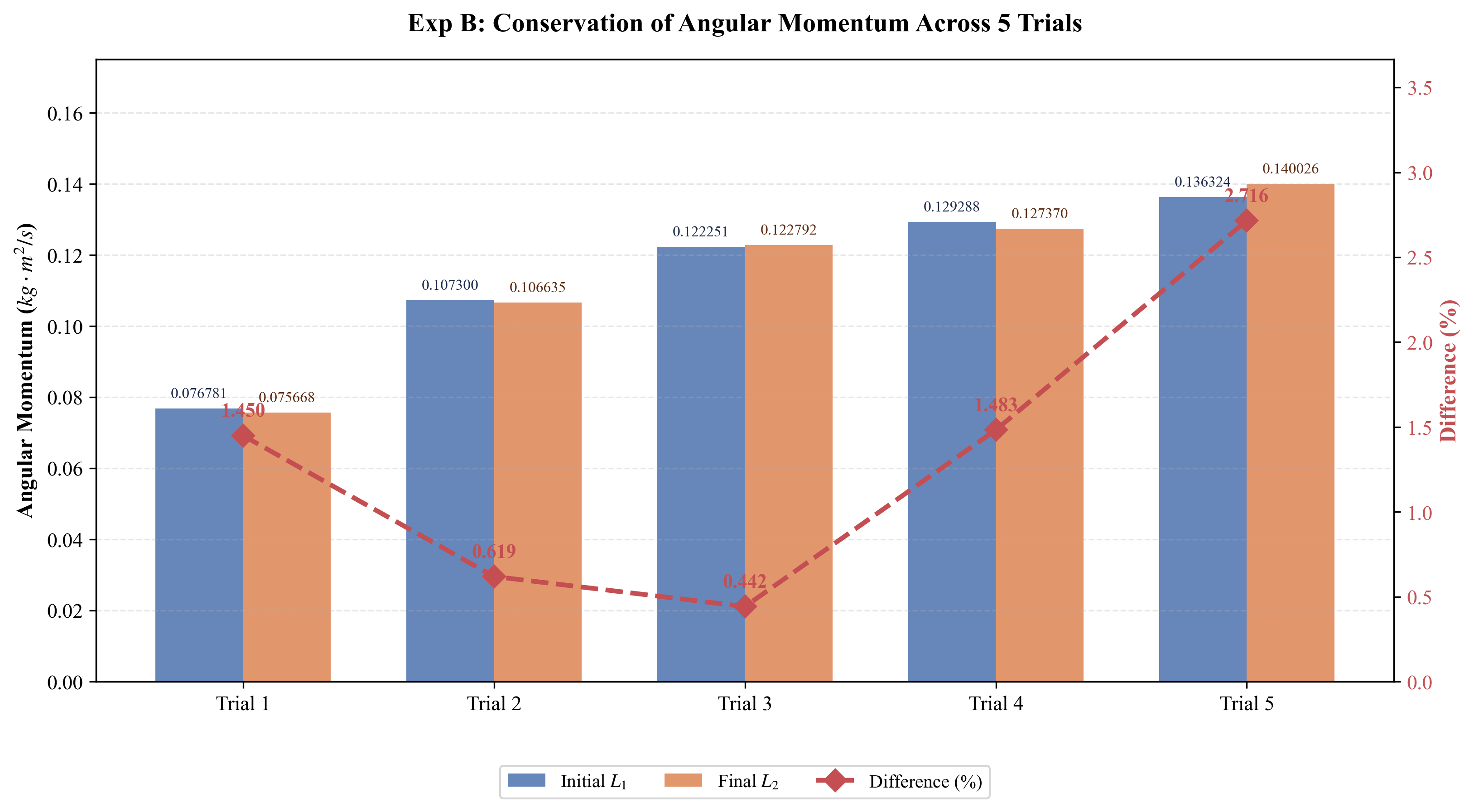
이 차트는 본 실험의 백미로, 막대그래프를 보면 5회의 Trial 모두 초기 각운동량 $L_1$과 나중 각운동량 $L_2$의 높이가 거의 완벽하게 일치한다. 우측 축을 기준으로 한 오차율(Difference) 꺾은선은 최소 0.44%에서 최대 2.71% 사이를 기록하며, **평균 1.34%** 라는 경이로운 정확도를 보여준다.
이는 각속도가 $\omega_1$에서 $\omega_2$로 급격히 감소함에도 불구하고, 관성모멘트의 증가폭($I_{disk} \to I_{total}$)이 이를 정확히 상쇄하여 $I_{disk}\omega_1 = I_{total}\omega_2$ 가 성립함을 수치상으로 완벽히 입증한 것이다.
다만, 미세한 잔여 오차(약 1.3%)가 발생하는 원인은 다음과 같다.
- **마찰 토크(Frictional Torque):** 원환을 떨어뜨리고 속도가 다시 안정화($\omega_2$)되기까지의 짧은 시간 동안 베어링의 마찰과 공기 저항이 시스템에 음(-)의 알짜 토크로 작용하여 각운동량을 미세하게 감소시켰다.
- **투하 시 중심축 편차:** 원환을 떨어뜨릴 때 완벽하게 정중앙에 놓이지 않고 중심축에서 $d$만큼 빗겨나게 되면, 평행축 정리($I = I_{cm} + Md^2$)에 의해 나중 관성모멘트가 예상보다 커지게 되어 각속도 변동에 미세한 오차를 유발한다.
## 6.4 종합 결론
본 실험을 통해 다음의 역학적 원리들을 성공적으로 검증하였다.
1. 강체의 질량과 기하학적 분포(반지름)가 관성모멘트를 결정짓는 핵심 요소임을 실험식 $I = mr^2 (\frac{g}{r\alpha} - 1)$을 통해 정량적으로 확인하였다. (오차율 5~6% 내외)
2. 외부 알짜 토크가 0인 고립계에서는 계 내부의 질량 분포가 변화(원환 투하)하여 각속도가 변하더라도, 총 각운동량은 일정하게 보존된다는 것을 평균 오차율 **1.34%** 의 높은 신뢰도로 입증하였다.
3. 실험 데이터 초기 분석 과정에서 회전축의 '직경'을 '반지름'으로 오인하여 대입했던 치명적인 휴먼 에러(초기 오차율 80% 이상)를 발견하고 수정하는 과정을 거쳤다. 이를 통해 데이터 검증의 중요성과 공식 내 변수(특히 제곱항인 $r$)의 민감도를 깊이 체험할 수 있었다.
## 6.5 Python 소스 코드 (데이터 시각화 알고리즘)
본 보고서의 데이터 분석에 사용된 Python 알고리즘의 핵심 시각화 함수(Dual-axis 콤보 차트 생성)는 다음과 같다.
import csv
import matplotlib.pyplot as plt
import numpy as np
import os
plt.rcParams['font.family'] = 'serif'
plt.rcParams['font.serif'] = ['Times New Roman', 'DejaVu Serif']
plt.rcParams['mathtext.fontset'] = 'stix'
plt.rcParams['axes.labelsize'] = 12
plt.rcParams['axes.titlesize'] = 14
plt.rcParams['xtick.labelsize'] = 11
plt.rcParams['ytick.labelsize'] = 11
plt.rcParams['legend.fontsize'] = 10
def plot_combo_chart(x_labels, bar1, label1, bar2, label2, line_data, line_label, title, y_left, y_right, filename):
"""
Helper function to generate a dual-axis combination chart.
Bars: 6 decimal places (smaller font).
Line: 3 decimal places (slightly larger, bolder font).
"""
fig, ax1 = plt.subplots(figsize=(11, 6.5))
x = np.arange(len(x_labels))
width = 0.35
rects1 = ax1.bar(x - width/2, bar1, width, label=label1, color='#4C72B0', alpha=0.85)
rects2 = ax1.bar(x + width/2, bar2, width, label=label2, color='#DD8452', alpha=0.85)
ax1.set_ylabel(y_left, fontweight='bold')
ax1.set_xticks(x)
ax1.set_xticklabels(x_labels)
ax1.bar_label(rects1, fmt='%.6f', padding=4, fontsize=8, color='#1b2a49')
ax1.bar_label(rects2, fmt='%.6f', padding=4, fontsize=8, color='#5c2a11')
max_bar_val = max(max(bar1), max(bar2))
if max_bar_val > 0:
ax1.set_ylim(0, max_bar_val * 1.25)
ax2 = ax1.twinx()
line = ax2.plot(x, line_data, color='#C44E52', marker='D', linestyle='--', linewidth=2.5, markersize=8, label=line_label)
ax2.set_ylabel(y_right, color='#C44E52', fontweight='bold')
ax2.tick_params(axis='y', labelcolor='#C44E52')
for i, val in enumerate(line_data):
if not np.isnan(val):
ax2.annotate(f'{val:.3f}',
(x[i], val),
textcoords="offset points",
xytext=(0, 10),
ha='center',
fontsize=10.5,
color='#C44E52',
fontweight='bold')
max_line_val = max([v for v in line_data if not np.isnan(v)] or [0])
if max_line_val > 0:
ax2.set_ylim(0, max_line_val * 1.35)
전체 데이터 파싱 및 전처리 로직이 포함된 전체 소스 코드는 첨부된 `main.py` 참조.
# 7. 실험시 주의사항
본 실험은 회전 역학계의 미세한 변화를 다루므로, 기하학적 오차와 마찰을 최소화하기 위해 다음의 사항들을 엄격히 준수하여 실험을 진행해야 한다.
## 7.1 회전 장치의 수평 유지 (Leveling)
회전 스탠드 베이스에 부착된 수준기(Leveler)의 기포가 정중앙에 오도록 나사를 조절하여 장치의 수평을 완벽하게 맞춰야 한다. 수평이 맞지 않으면 원판의 회전축이 기울어져 중력의 분력이 회전 방향으로 작용하게 되며, 이는 의도치 않은 추가적인 알짜 토크(Torque)를 발생시켜 각가속도 측정에 심각한 계통 오차를 유발한다.
## 7.2 실의 겹침 방지 및 수평 정렬 (String Winding & Alignment)
회전축(3단 도르래)에 실을 감을 때, 실이 겹치지 않고 한 줄로 나란히 감기도록 해야 한다. 실이 겹쳐서 감길 경우 회전축의 유효 반지름($r$)이 실의 두께만큼 변하게 된다. 실험 공식 $I = mr^2 (\frac{g}{r\alpha} - 1)$에서 $r$은 제곱으로 비례하므로 미세한 반지름 변화도 관성모멘트 도출에 큰 오차를 초래한다. 또한, 실이 스마트 도르래(Smart Pulley)로 넘어갈 때 지면과 완벽한 수평을 이루도록 도르래의 높이를 조절해야 장력이 온전히 회전축의 접선 방향 토크로 작용한다.
## 7.3 원환 투하 시 정확한 중심 일치 (Centering the Mass Ring)
실험 B(각운동량 보존)에서 회전하는 원판 위에 원환을 떨어뜨릴 때, 원환이 원판의 정중앙 가이드 홈에 정확히 맞물리도록 낙하시켜야 한다. 만약 중심에서 $d$만큼 빗겨나서 떨어지게 되면 평행축 정리($I = I_{cm} + Md^2$)에 의해 원환의 관성모멘트가 비정상적으로 커지게 되어, 나중 각운동량 계산 시 큰 오차가 발생한다.
## 7.4 외부 토크 개입 최소화 (Minimizing External Torque)
원환을 떨어뜨릴 때 손으로 회전 방향의 힘(초기 각속도)을 주거나 수직으로 강하게 짓누르지 않도록 주의해야 한다. 오직 중력에 의해서만 살짝 내려놓듯이 투하(Drop)해야 하며, 충돌 시 발생하는 마찰 이외의 외부 토크가 계에 개입되지 않도록 하여야 순수한 각운동량 보존을 관찰할 수 있다.
## 7.5 추의 낙하 안전거리 확보 (Safety of Hanging Mass)
실험 A 진행 시, 낙하하는 추가 바닥이나 스마트게이트 장치에 부딪히지 않도록 주의한다. 추가 바닥에 충돌하는 순간 장력($T$)이 갑자기 0이 되거나 반동이 생겨 데이터(각가속도 선형 구간)가 훼손될 수 있으므로, 바닥에 닿기 직전까지만 데이터를 수집하고 손이나 쿠션으로 추를 안전하게 받아내야 한다.
# 8. 참고문헌
[1] 경희대학교, "E1-05 각운동량 보존," APHY1002-11 물리학및실험1 실험자료 (PDF), n.d.
[2] 경희대학교, "E1-05\_각운동량 보존," APHY1002-11 물리학및실험1 실험자료 (PDF), n.d.
[3] 경희대학교, "EXP05_각운동량보존," APHY1002-11 물리학및실험1 실험 데이터 시트 (CSV), 2026.
[4] 경희대학교, "물리학 실험-OT-이건빈," APHY1002-11 물리학및실험1 오리엔테이션 자료 (PDF), n.d.
[5] 毛骏健, 顾牡 (마오쥔젠, 구무), 『大学物理学(第三版)(上册)』 (대학물리학 제3판 상권), 高等教育出版社 (고등교육출판사), 2020, ISBN: 9787040548822.
Comments NOTHING