
Posted on 2026-06-05
Excerpt
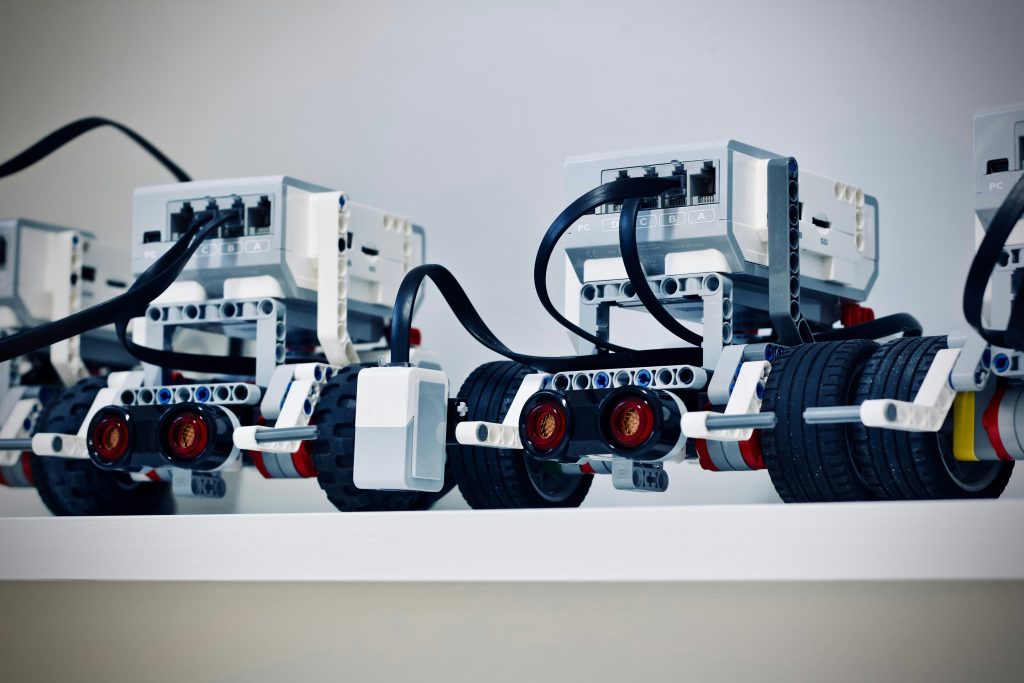
In diesem Projekt wurde ein intelligenter Linienverfolgungs- und Materialtransport-Roboter auf Basis der LEGO MINDSTORMS EV3-Plattform entworfen und implementiert. Um die Herausforderungen der Erkennung mehrerer Kreuzungen auf komplexen Strecken, der dynamischen Linienverfolgung und der Aufnahme bestimmter Objekte zu bewältigen, wurde in der unteren Bewegungsebene ein verbesserter Proportional-Differential (PD)-Regelalgorithmus auf Basis eines diskreten Zeitsystems eingeführt. In Kombination mit einem differentialgetriebenen Bewegungsmodell wurde eine sanfte und adaptive Trajektorienverfolgung des Roboters realisiert. Für die makroskopische Pfadplanung und Aufgabenausführung wurde ein deterministisches Entscheidungsbaummodell auf Basis der Booleschen Logik und eines endlichen Automaten (Finite State Machine, FSM) entwickelt, das typische technische Probleme wie „Sensor-Blindung“, „falsche Kreuzungserkennung“ und „falsch-positive Zielerkennung“ löst. Dieser Aufsatz erläutert detailliert die theoretischen Grundlagen des Regelungssystems, die mathematische Herleitung der Algorithmen, das kooperative Software-Hardware-Design und vergleicht die Leistung verschiedener Regler auf geraden, elliptischen und komplexen 8-förmigen Trajektorien unter Bezugnahme auf die Geschichte der Kybernetik und relevante empirische Studien. Gleichzeitig werden Optimierungsmaßnahmen für die Rechenleistung auf unterer Ebene vorgeschlagen, die auf die physikalischen Eigenschaften eingebetteter Systeme (wie CPU-Hunger, PWM-Regelungsantwort) abzielen$^{[1]}$. 
