
Posted on 2026-06-05
Excerpt
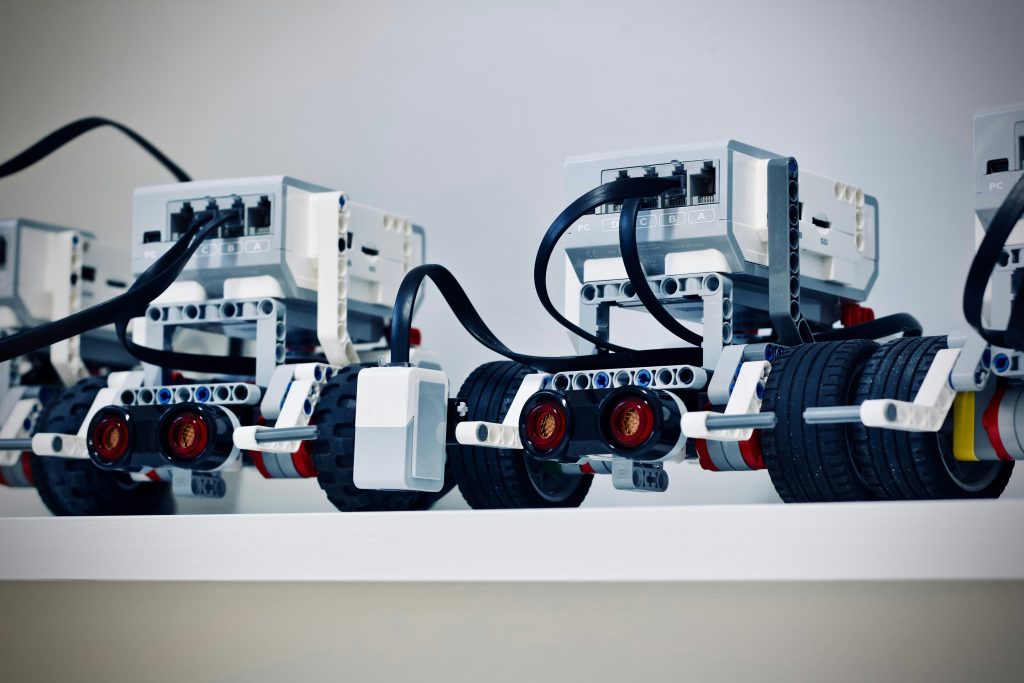
This project designs and implements an intelligent line-tracking and material-handling robot based on the LEGO MINDSTORMS EV3 platform. To address the challenges of multi-intersection recognition, dynamic line tracking, and specific material grasping in complex track environments, this system introduces an improved discrete-time proportional-derivative (PD) control algorithm in the low-level motion control layer. Combined with a differential-drive kinematic model, the system achieves smooth and adaptive trajectory tracking. At the macro path-planning and task-execution level, a deterministic decision tree model based on Boolean logic and a finite-state machine (FSM) is constructed, solving typical engineering problems such as "sensor blinding," "intersection misjudgment," and "false positive endpoint detection." This paper elaborates on the control theory foundation, mathematical derivation of the algorithm, hardware-software co-design, and compares the performance of different controllers on straight lines, ellipses, and figure-8 complex trajectories in the context of control theory history and related empirical studies. Furthermore, low-level computational optimization strategies are proposed for the physical characteristics of embedded systems (e.g., CPU starvation, PWM control response)$^{[1]}$. 


