
Posted on 2026-06-05
Excerpt
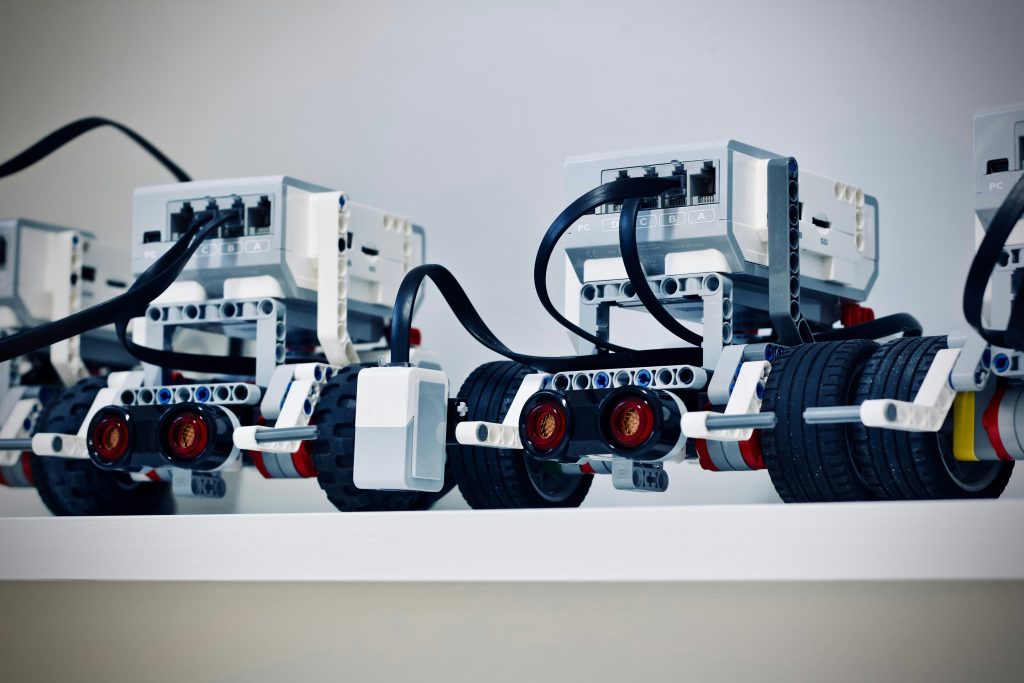
본 프로젝트는 LEGO MINDSTORMS EV3 플랫폼을 기반으로 한 지능형 라인트래킹 및 물류 운반 로봇을 설계하고 구현한다. 복잡한 트랙 환경에서의 다중 교차로 인식, 동적 라인트래킹 및 특정 물체 파지 요구사항을 해결하기 위해, 본 시스템은 하위 수준의 운동 제어에 이산 시간 기반의 개선된 비례-미분(PD) 제어 알고리즘을 도입하고, 차동 구동 운동학 모델과 결합하여 부드럽고 적응적인 궤적 추종을 구현한다. 상위 수준의 경로 계획 및 작업 실행에서는 부울 논리와 유한 상태 기계(FSM) 기반의 결정적 결정 트리 모델을 구축하여 "센서 블라인딩", "교차로 오판", "가양성 종점 탐지"와 같은 전형적인 공학 문제를 해결한다. 본 논문은 제어 이론의 기초, 알고리즘의 수학적 유도, 하드웨어-소프트웨어 협력 설계를 상세히 설명하고, 제어 이론의 역사 및 관련 실증 연구와 함께 직선, 타원 및 8자형 복잡 궤적에서의 다양한 제어기의 성능을 비교한다. 또한 임베디드 시스템의 물리적 특성(예: CPU 기아, PWM 제어 응답)에 대한 하위 수준의 연산 최적화 방안을 제안한다$^{[1]}$. 
